新闻中心 - 成都慧视光电技术有限公司
-
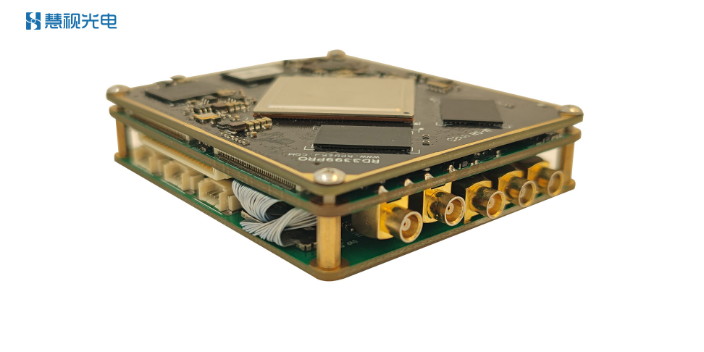
 河南边海防AI智能处理板
河南边海防AI智能处理板SpeedDP包含如下五个模块:1.数据集管理:采集并制作用于训练和测试的数据集;2.项目配置:根据项目的实际情况,对调整相关配置参数进行定制化开发;3.模型训练:完成训练参数配置,开始模型训练并监控...
发布时间:2024.09.19