-

 湖南智能采摘机器人价格低
发布时间:2026.05.30
湖南智能采摘机器人价格低
发布时间:2026.05.30
采摘机器人的维护与保养是确保其长期稳定作业的关键,合理的维护与保养不*能延长机器人的使用寿命,还能提升作业效率,降低运营成本。采摘机器人的维护主要包括日常检查、定期保养和故障维修三部分:日常检查主要针...
-
 山东压装机瑕疵检测系统按需定制
发布时间:2026.05.29
山东压装机瑕疵检测系统按需定制
发布时间:2026.05.29
汽车制造业是瑕疵检测系统的深度应用场景,其应用覆盖了从冲压件、铸件到内饰件的全产业链。汽车零部件对尺寸精度和表面质量要求极高,传统人工检测难以满足大批量、高质量的需求。系统在冲压车间,可检测钣金件的划...
-
 吉林冲网定制机器视觉检测服务技术参数
发布时间:2026.05.28
吉林冲网定制机器视觉检测服务技术参数
发布时间:2026.05.28
定制视觉检测服务,让您的产品检测更加高效、智能。高效体现在检测速度与生产节奏的匹配 —— 我们会根据您的生产线节拍,优化系统的图像采集与数据分析速度,确保检测环节不成为生产瓶颈,甚至能提升整体生产效率...
-
 安徽传送带跑偏定制机器视觉检测服务供应商
发布时间:2026.05.28
安徽传送带跑偏定制机器视觉检测服务供应商
发布时间:2026.05.28
定制视觉检测服务,让您的生产线更加智能化、自动化。传统生产线中,质检环节常需人工搬运产品、记录数据,形成自动化生产的 “断点”。定制视觉检测服务通过自动化集成设计,可与生产线的 PLC、MES 系统深...
-
 江西冲网定制机器视觉检测服务处理方法
发布时间:2026.05.27
江西冲网定制机器视觉检测服务处理方法
发布时间:2026.05.27
专业的定制视觉检测,为您的生产线提供持续的品质支持。我们的服务并非一次性的方案交付,而是长期的品质陪伴。生产线运行过程中,若出现产品规格调整、生产工艺优化等情况,我们会在 48 小时内完成检测方案的调...
-
 天津自制智能采摘机器人品牌
发布时间:2026.05.26
天津自制智能采摘机器人品牌
发布时间:2026.05.26
蔬菜采摘机器人主要应用于温室大棚和露天蔬菜种植基地,针对黄瓜、辣椒、番茄、茄子等常见蔬菜的生长特点,实现自动化采摘,解决了蔬菜采摘劳动力短缺、季节性用工紧张的难题。蔬菜采摘机器人的优势的是适配性强,可...
-
 山东果实智能采摘机器人售价
发布时间:2026.05.25
山东果实智能采摘机器人售价
发布时间:2026.05.25
采摘机器人的性能突破依赖感知、规划、执行三大技术的深度融合,其中视觉感知是实现精细作业的前提。感知层融合高清相机、激光雷达、多光谱传感器,通过深度学习算法构建果实三维位置与姿态模型,成熟度识别误差小于...
-
 广东番茄智能采摘机器人服务价格
发布时间:2026.05.25
广东番茄智能采摘机器人服务价格
发布时间:2026.05.25
未来,苹果智能采摘机器人的技术迭代将聚焦于 “精细识别 + 高效作业 + 低损采摘” 三大**,依托 AI 算法升级实现全场景适配能力的突破。针对苹果种植中 “果叶遮挡、果柄角度不一、成熟度差异” 等...
-
 江苏节能智能采摘机器人价格低
发布时间:2026.05.24
江苏节能智能采摘机器人价格低
发布时间:2026.05.24
未来苹果智能采摘机器人将针对我国多样化的苹果种植模式,完成定制化技术优化,打破 “场景适配难” 的行业壁垒。我国苹果种植主要分为矮化密植、乔化栽培、棚架栽培三大模式,不同模式对机器人的作业空间、机械臂...
-
 江苏铅酸电池定制机器视觉检测服务优势
发布时间:2026.05.23
江苏铅酸电池定制机器视觉检测服务优势
发布时间:2026.05.23
定制视觉检测服务,让您的产品检测更加高效、智能。高效体现在检测速度与生产节奏的匹配 —— 我们会根据您的生产线节拍,优化系统的图像采集与数据分析速度,确保检测环节不成为生产瓶颈,甚至能提升整体生产效率...
-
 南通电池瑕疵检测系统趋势
发布时间:2026.05.22
南通电池瑕疵检测系统趋势
发布时间:2026.05.22
瑕疵检测系统在汽车玻璃生产中的应用,严格保障汽车玻璃的安全性与外观品质,适配前挡风玻璃、侧窗玻璃、后挡风玻璃等各类汽车玻璃。汽车玻璃的划痕、崩边、气泡、结石、裂纹等瑕疵,会影响玻璃的强度与透光性,存在...
-
 广东传送带跑偏定制机器视觉检测服务定制
发布时间:2026.05.22
广东传送带跑偏定制机器视觉检测服务定制
发布时间:2026.05.22
定制机器视觉检测服务注重系统集成的无缝衔接,确保检测系统与企业现有生产产线、管理系统高效协同,避免对现有生产流程造成干扰。服务团队会根据企业的产线布局和生产节拍,优化检测系统的安装位置和检测流程,实现...
-
 山东定制机器视觉检测服务性能
发布时间:2026.05.21
山东定制机器视觉检测服务性能
发布时间:2026.05.21
定制机器视觉检测服务在新能源电池行业的应用,成为推动行业高质量发展的重要支撑。新能源电池的质量直接关系到终端产品的安全性和使用寿命,其检测需求涵盖极片、电芯、电池包等多个环节,且对检测精度和速度要求极...
-
上海传送带跑偏瑕疵检测系统供应商
发布时间:2026.05.21
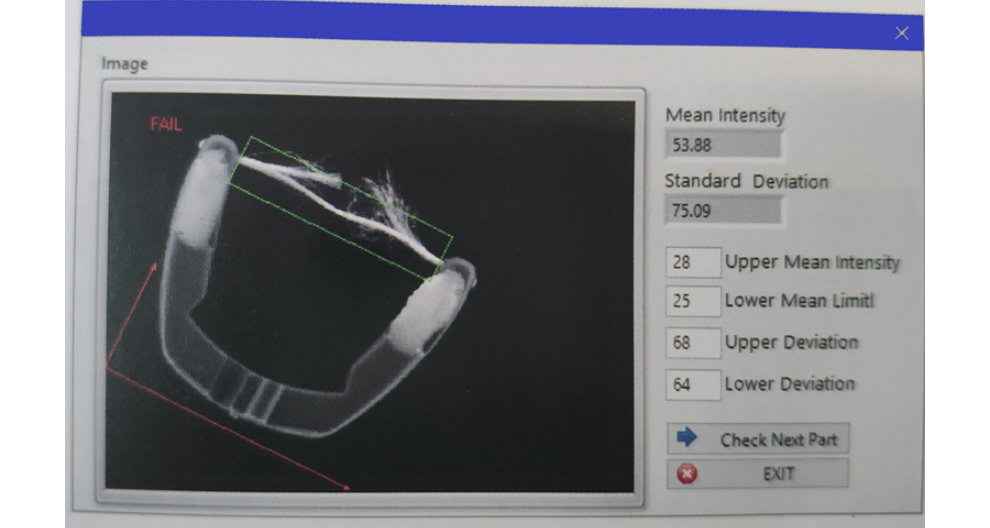
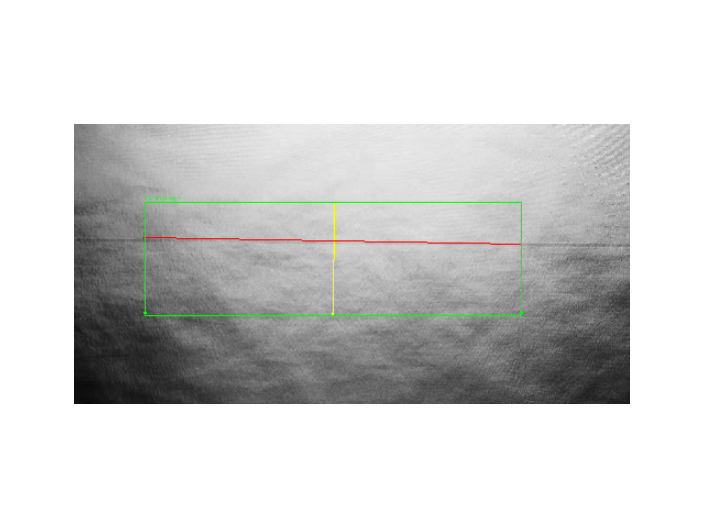
在现代化工业制造流程中,金属片表面瑕疵检测系统扮演着至关重要的质量控制角色。该系统集成了机器视觉、光学成像与深度学习算法,旨在替代传统人工目检效率低、标准不一的弊端。通常由高分辨率工业相机、定制化多角...
-
 辽宁六轴机械臂实训平台品牌
发布时间:2026.05.21
辽宁六轴机械臂实训平台品牌
发布时间:2026.05.21
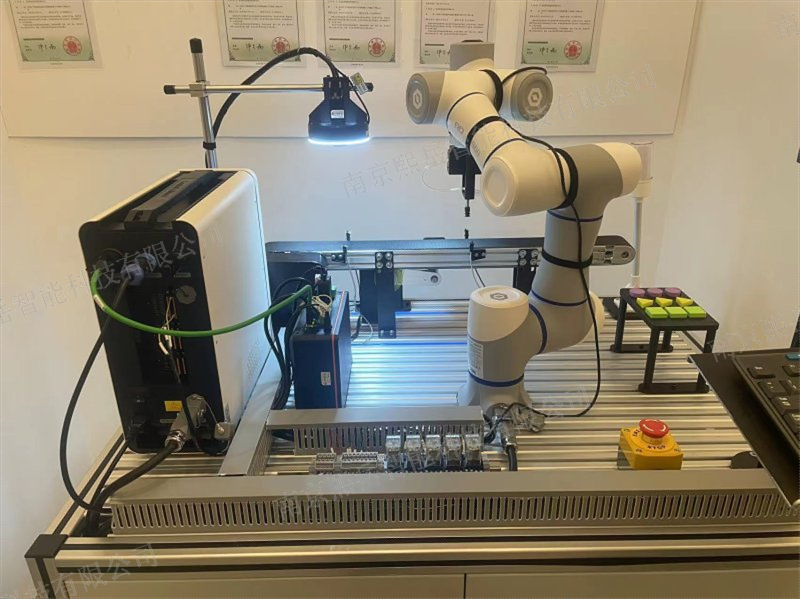
视觉实训平台在算法技术上具备不可替代的优势,搭载了自主研发的视觉算法与行业前沿算法,兼顾算法的专业性与实用性,能够满足不同层次的实训需求,同时助力学习者掌握行业核心算法技术。平台整合了目标检测、图像识...
-
 河南分类实训平台定制
发布时间:2026.05.21
河南分类实训平台定制
发布时间:2026.05.21
实训平台,作为学生实践技能的摇篮,不*为学生提供了丰富多样的实训课程和项目,更让学生在其中锤炼技艺,磨砺才华。这个平台宛如一个巨大的实验室,汇聚了各种先进的设备和技术,让学生在实践中学习,在学习中实践...
-
 杭州篦冷机工况瑕疵检测系统服务价格
发布时间:2026.05.20
杭州篦冷机工况瑕疵检测系统服务价格
发布时间:2026.05.20
在医疗器械生产中,瑕疵检测系统的应用严格保障医疗器械的精度与安全性,适用于手术器械、植入式医疗器械、医疗仪器零部件等各类医疗器械。医疗器械对精度、洁净度要求极高,其表面的划痕、锈蚀、变形、异物混入、尺...
-
 南京篦冷机工况瑕疵检测系统用途
发布时间:2026.05.20
南京篦冷机工况瑕疵检测系统用途
发布时间:2026.05.20
在面板制造行业,瑕疵检测系统的应用是保障面板显示效果与品质的关键,适用于液晶面板、OLED面板、Mini LED面板等各类显示面板。显示面板的亮点、暗点、色斑、划痕、Mura、亮暗线等瑕疵,会严重影响...
-
 连云港篦冷机工况瑕疵检测系统
发布时间:2026.05.20
连云港篦冷机工况瑕疵检测系统
发布时间:2026.05.20
在玩具生产中,瑕疵检测系统的应用保障了玩具的安全性与外观品质,适用于塑料玩具、毛绒玩具、电子玩具等各类玩具产品。玩具的表面划痕、破损、毛刺、色差、零件漏装、尖锐边角等瑕疵,会影响玩具的外观与安全性,尤...
-
杭州铅板瑕疵检测系统优势
发布时间:2026.05.20
在皮革制品生产中,瑕疵检测系统的应用提升了皮革制品的外观品质与附加值,适用于真皮、人造革、合成革等各类皮革产品。皮革制品的表面划痕、破损、污渍、色差、毛孔不均、裂纹等瑕疵,会影响产品的外观与品质,降低...
-
 天津智能瑕疵检测系统
发布时间:2026.05.19
天津智能瑕疵检测系统
发布时间:2026.05.19
在金属加工行业,瑕疵检测系统的应用有效提升金属产品的表面质量与机械性能,降低生产损耗。金属材料如冷轧钢板、铝合金型材、精密机械零件等,其表面的氧化斑点、划痕、裂纹、麻点、毛刺等瑕疵,会影响产品的外观、...
-
浙江电池片阵列排布瑕疵检测系统趋势
发布时间:2026.05.19
人才培养与组织变革,是瑕疵检测系统落地并发挥比较大效能的关键因素。系统的引入,不*是技术的升级,更是对原有质检模式与人员角色的重塑。企业需要对现有质检人员、设备维护人员和管理人员进行系统性培训,使其从...
-
 安徽传送带跑偏瑕疵检测系统产品介绍
发布时间:2026.05.19
安徽传送带跑偏瑕疵检测系统产品介绍
发布时间:2026.05.19
瑕疵检测系统在家具生产中的应用,提升了家具产品的外观品质与稳定性,适用于木质家具、金属家具、塑料家具等各类家具产品。家具的表面划痕、破损、色差、拼接缝隙过大、五金配件松动等瑕疵,会影响家具的外观与使用...
-
常州电池瑕疵检测系统
发布时间:2026.05.19
项目实施后的效果评估与持续优化,是确保瑕疵检测系统价值兑现的关键环节。应建立量化的 KPI 考核体系,定期对比系统上线前后的良品率、检测效率、人工成本等指标,验证系统是否达到预期目标。同时,建立常态化...
-
 广西实训平台性能
发布时间:2026.05.18
广西实训平台性能
发布时间:2026.05.18
在实训平台上,学生不*能够学习专业知识与技能,更能够深刻体验到团队协作的重要性。实训平台为学生提供了与团队成员紧密合作的机会,让他们在实践中学会如何有效沟通、协调分工,共同完成任务。在这个过程中,学生...
-
广东瑕疵检测系统案例
发布时间:2026.05.18
新能源行业对产品安全性与寿命的追求,使得瑕疵检测系统成为锂电池、光伏组件生产中不可或缺的环节。在锂电池制造中,极片的褶皱、漏涂、断栅,电芯的内部短路、鼓包,电池包的装配错位等瑕疵,都可能引发热失控等严...
-
 广西实训平台技术参数
发布时间:2026.05.18
广西实训平台技术参数
发布时间:2026.05.18
视觉实训平台的场景适配性极强,能够满足不同行业、不同领域的实训需求,彰显了其广泛的应用价值。在工业制造领域,平台可模拟工业视觉检测场景,开展产品缺陷检测、尺寸测量、零件识别等实训,帮助学习者掌握工业视...
-
嘉兴篦冷机工况瑕疵检测系统性能
发布时间:2026.05.18
边缘计算与云计算的协同架构,是瑕疵检测系统应对大规模、分布式生产场景的必然趋势。在生产现场,边缘计算节点负责实时处理图像数据,保证检测的低延迟与高可靠性,快速执行不良品剔除等操作。同时,边缘节点将关键...
-
连云港传送带跑偏瑕疵检测系统
发布时间:2026.05.17
瑕疵检测系统在电梯零部件生产中的应用,严格保障电梯零部件的精度与安全性,助力电梯安全运行。电梯零部件如电梯门、导轨、曳引机、安全钳等,对精度、强度要求极高,其表面的划痕、裂纹、变形、尺寸偏差、焊接缺陷...
-
 视觉实训平台公司
发布时间:2026.05.17
视觉实训平台公司
发布时间:2026.05.17
视觉实训平台注重产教融合与校企协同,通过与行业企业合作,实现实训资源的优势互补,提升人才培养的针对性和实用性。当前,视觉技术发展迅速,行业岗位需求不断更新,依靠高校自身的资源,难以实现实训内容与行业需...