新闻中心 - 扬州熙岳智能科技有限公司
-
 安徽视觉检测软件
安徽视觉检测软件玩具作为儿童日常接触的重要用品,其质量安全直接关系到儿童的健康成长。熙岳智能高度重视玩具产品的质量检测,运用先进的视觉检测技术,为儿童用品安全提供了有力保障。在玩具生产过程中,从塑料玩具的表面飞边、毛...
发布时间:2026.06.26 -
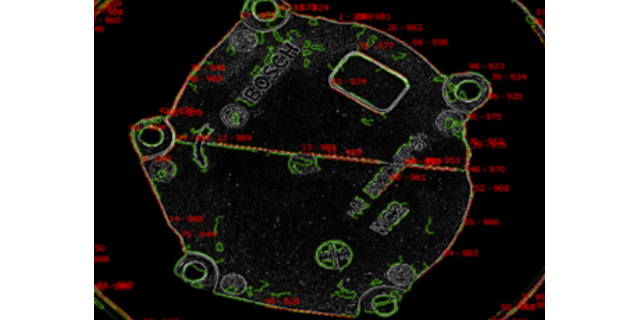 江西外观视觉检测设备
江西外观视觉检测设备橡胶制品广泛应用于汽车、机械、航空等多个领域,其尺寸精度和表面质量直接影响产品的性能与使用寿命。熙岳智能针对橡胶制品的检测特性,研发出专业的视觉检测设备,为生产达标提供可靠保障。该设备采用激光三维扫描...
发布时间:2026.06.25 -
 江苏视觉检测系统厂家
江苏视觉检测系统厂家家具产品的品质和价值在很大程度上取决于木材的纹理和质量,准确检测木材纹理与缺陷是家具制造企业提升产品品质的关键环节。熙岳智能的视觉检测技术,利用先进的图像处理和识别算法,助力家具企业实现品质升级。该技...
发布时间:2026.06.18