新闻中心 - 浙江勃展工业自动化设备有限公司
-
 数控机器人机器人
数控机器人机器人随着现代自动化程度的不断提高,机械手的应用变得越来越常见。在机械行业中,铸、锻、焊、铆、冲压、热处理、机加工、装配、检验、喷涂、电镀等工艺过程和工种都有应用的实例。其它行业,如轻工业、建筑业、、塑...
发布时间:2023.05.01 -
 安徽上下料机器人定制
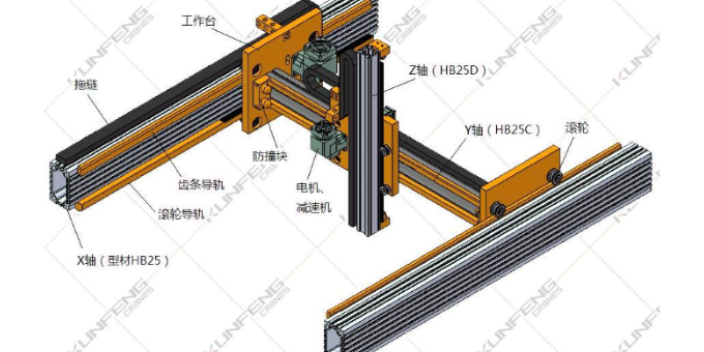
安徽上下料机器人定制桁架式上下料机器人是一种基于直角X、(Y)、Z两轴或三轴坐标系统基础上,对工件进行工位调整,或实现工件的轨迹运动等功能的全自动工业设备。其控制要点通过工业控制器(PLC,运动控制,单片机等)实现。通过...
-
 温州上下料机械手直销
温州上下料机械手直销数控桁架机械手的位置再现性是对精度的统计。即使在相同的环境、相同的条件、相同的动作、相同的命令下,机械手也可能不会*匹配每个动作的位置,从而产生一定的误差。但是,可控机械手的误差在一定范围内。在测试桁...
-
 舟山桁架机械手机器人
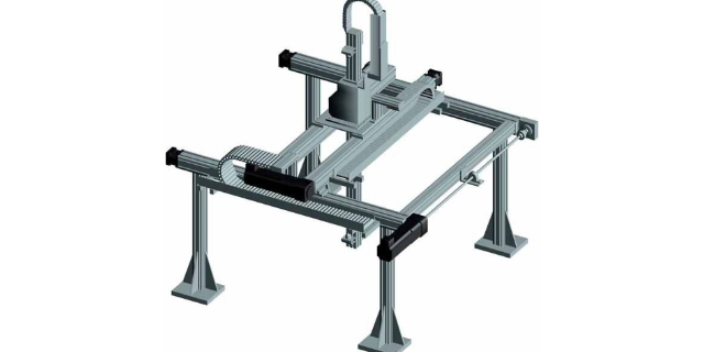
舟山桁架机械手机器人桁架机械手的优点:采用**度结构钢,整体强度高,不易振动晃动。滚轮导轨运动机构,承载能力强。安装调整要求低,与复杂的关节机器人相比,结构设计便于人员理解.操作简单.维护方便。使用寿命长,不像普通直线导...
-
 河南定制机器人机器人
河南定制机器人机器人机器人自动抛光系统由一台工业机器人实现全自动控制、可重复编辑、能在三维空间里完成各种抛光作业。机器人手抓车载承重力50-80KG,臂长1900~2150mm。抛光机具有多个可用磨削接触轮,...