新闻中心 - 深圳市德澳美科技有限公司
-
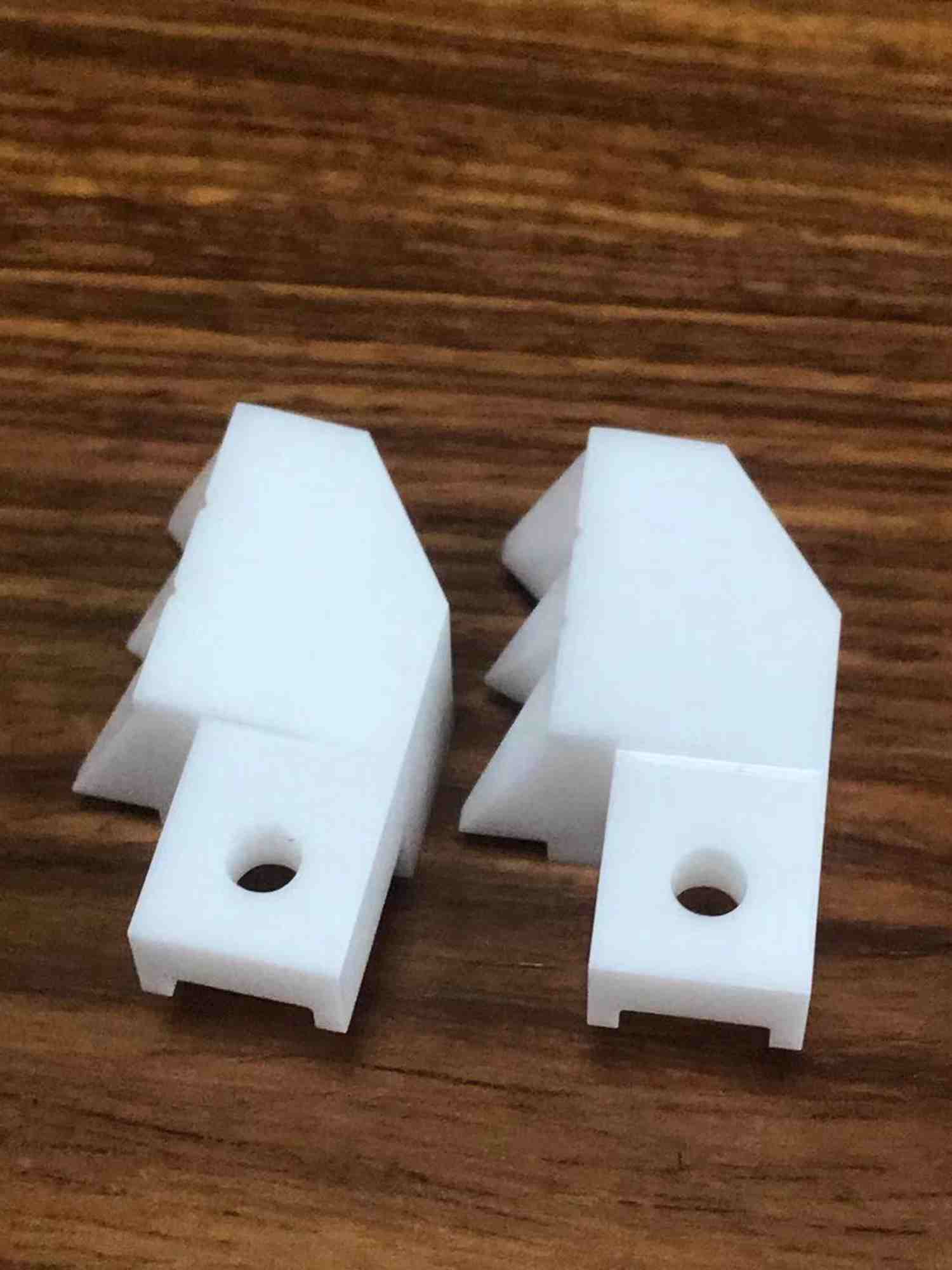
 广东新款晶圆运送机械吸臂批发
广东新款晶圆运送机械吸臂批发晶圆是半导体行业的关键元件,随着半导体行业的迅速发展,晶圆的搬运技术逐渐成为制约行业发展的关键因素。晶圆搬运机械手是IC装备的**之一,其性能的优劣直接影响晶圆的生产效率和制造质量,体现着整个加工系...
发布时间:2023.06.08 -
 珠海库存精密结构陶瓷新报价
珠海库存精密结构陶瓷新报价微晶耐磨氧化铝衬砖厂家深圳市德澳美精密制造有限公司介绍该产品其**是控制三个主要因素:原料的选择、粉料的制备和烧结;原材料选用的是山铝高纯度相位的阿尔法氧化铝和晶体生长***剂;粉料采用领...
-
 深圳销售晶圆运送机械吸臂批发零售价
深圳销售晶圆运送机械吸臂批发零售价基因决定”——生长方法导致若要回答这个问题,首先要说一个大约有100余年历史的原因。。。1918年,前苏联科学家切克劳斯基(Czochralski)建立起来一种晶体生长方法——直拉式晶体生...
-
 广东新款微孔陶瓷真空吸盘价格多少
广东新款微孔陶瓷真空吸盘价格多少3、等静压成型 对形状特殊和尺寸大的氧化锆结构陶瓷,需采用等静压成型。等静压成型的坯体由于各方向所受压力均匀相等,且压力大,因此成型后的坯体密度高,均匀性好,烧成收缩小,不易变形、开裂、分层...
-
 广东进口微孔陶瓷真空吸盘厂家报价
广东进口微孔陶瓷真空吸盘厂家报价吸音材料多孔陶瓷具有连通开气孔,当声波传入时,在很小的气孔内受力振荡。振动受到的摩擦和阻碍,使声波传播受到***,导致声音衰减,从而起到吸音的作用。是一种消除噪声公害,益于人们身心健康的好...
-
 东莞新款晶圆运送机械吸臂经销批发
东莞新款晶圆运送机械吸臂经销批发9)模糊与神经网络控制。是一种语言控制器,可反映人在进行控制活动时的思维特点。其主要特点之一是控制系统设计并不需要通常意义上的被控对象的数学模型,而是需要操作者或**的经验知识,操作数据等...
-
 广东进口精密结构陶瓷维修
广东进口精密结构陶瓷维修深圳市德澳美精密制造有限公司工厂生产加工陶瓷手臂已经有7年历史,可以加工各种规格陶瓷手臂,适用于2寸,4寸,6寸,8寸,12寸。根据客户图纸加工,也可以来样加工,**代为设计。加工周期一般为3天。...
-
 深圳微孔陶瓷真空吸盘公司
深圳微孔陶瓷真空吸盘公司2)利用多孔陶瓷制备多孔电极。以多孔气体扩散电极为例,它的比表面积不但比平板电极提高3~5个数量级,而且液相传质层的厚度也从平板电极的10cm压缩到1O~10cm,从而**提高电极的极限电流密度,...
-
 广东正规晶圆运送机械吸臂经销批发
广东正规晶圆运送机械吸臂经销批发研究背景近年来,随着机器人技术的发展,应用高速度、高精度、 高负载自重比的机器人结构受到工业和航空航天领域的关注。由于运动过程中关节和连杆的柔性效应的增加,使结构发生变形从而使任务执行的精度降低。所以...
-
 汕头库存微孔陶瓷真空吸盘
汕头库存微孔陶瓷真空吸盘(3)“钉扎”理论, 认为存在于基体晶界的纳米颗粒产生“钉扎”效应,从而限制了晶界滑移和孔穴、蠕变的发生,晶界的增强导致纳米氧化锆复相陶瓷韧性的提高。 二、氧化锆增韧陶瓷的种类 氧化锆...
-
 全国库存微孔陶瓷真空吸盘销售词
全国库存微孔陶瓷真空吸盘销售词氧化锆材料有多种优异性能,特别是具有增韧的作用,因而被作为韧性陶瓷***地应用的。它具有高的韧性、高的抗弯强度、高的硬度和耐磨性等特点,更显示出应用的***性。它在机械、电子、石油、化工、...
-
 韶关微孔陶瓷真空吸盘销售价格
韶关微孔陶瓷真空吸盘销售价格综上所述,由于氧化锆陶瓷自身有着诸多***的特点,所以近些年来,利用氧化锆陶瓷加工而成的产品也是深受大家的青睐。使用氧化锆陶瓷加工而成的产品,由于其稳定性非常好,大家完全可以放心使用。关键...