商机详情 -
福建排水管道检测与评估服务电话
管道检测机器人实施检测在实施检测的过程中,应根据规范要求操作设备。在遇到障碍物时,应该降低抬升高度(降低重心),调整车速,防止翻车。如果障碍物较大,应该暂停爬行,评估爬行器能否爬过,如若不能,应停止检测,以免发生翻车风险。如遇爬行器被障碍物卡住的情况,先停止爬行,将电缆线从电缆盘上拉出1到2米,然后再开始爬行,如仍然不能够通过,可先后退,然后调整方向反复尝试。在实施检测的过程中,请选择合理的灯光亮度,避免光源过度发热。破裂1级:管壁上可见持续纵向裂痕,长度大于30cm,小于一节管道的1/3。福建排水管道检测与评估服务电话

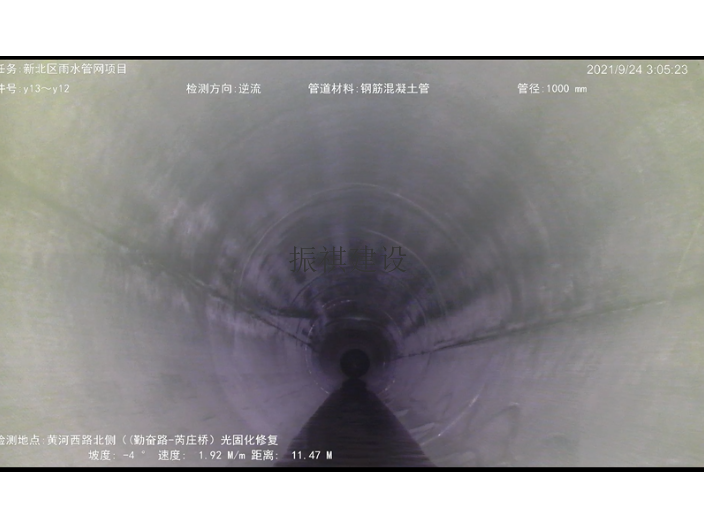
CCTV检测机器人在检测过程中,可快速抓取缺陷图片,检测完成后,可立即得到检测报告。此外,可以在检测的过程中实时获取管道的坡度曲线,以此判断管道内部沉积情况。可搭载激光侧扫仪和全景镜头,生成管道内壁的高清视频、横断面轮廓、全景图、色谱图等多项数据,实现管道缺陷的量化。工作环境要求:1、积水面积可靠的CCTV管道检测机器人的外部防护防水等级较高,可以应对基本的浸水作业,但是如果长时间侵泡在水中进行检测工作,可能不能达到理想的效果,检测的结果和实际情况有偏差,另一方面还会对CCTV管道检测机器人内部零件造成损伤,减少使用寿命,因此机器人在检测管道前要了解管道底部的过水面积,超过一定的范围是不允许进行作业的。舟山污水管道检测与评估维修电话管道机器人设备在实施检测的过程中,应根据规范要求操作设备。
管道检测修复主要包含以下两个方面:1、功能性检测:管道检测修复的排水管道功能性检测主要是以检查管道排水功能为目的的检测,一般检测管道的有效过水断面,并将管道实际过流量与设计流量进行比较,以确定管道的功能性状况。2、结构性检测:管道检测修复的排水管道结构性检测主要是以检查管道材料结构现状为目的的检测,这类检测主要了解管道的结构现状以及连接状况,通过综合评估后确定管道给地下水资源及市政设施是否带来影响。对于这类结构性问题被检测出来后一般需要通过管道检测修复的手段来解决。
管道检测机器人实施检测在实施检测的过程中,应根据规范要求操作设备。在遇到障碍物时,应该降低抬升高度(降低重心),调整车速,防止翻车。如果障碍物较大,应该暂停爬行,评估爬行器能否爬过,如若不能,应停止检测,以免发生翻车风险。如遇爬行器被障碍物卡住的情况,先停止爬行,将电缆线从电缆盘上拉出1到2米,然后再开始爬行,如仍然不能够通过,可先后退,然后调整方向反复尝试。在实施检测的过程中,请选择合理的灯光亮度,避免光源过度发热。选择合适功率的电源电源功率选择不合适,可能会导致工作时系统掉电,推荐使用市电、1KW以上发电机、峰值功率1KW以上的移动电源等。管道QV(Quick View)检测仪采用可调节长度的手柄将高倍变焦的摄像头放入窖井或管道。

管道机器人设备在实施检测的过程中,应根据规范要求操作设备,在遇到障碍物时,应该降低抬升高度(降低重心),调整车速,防止翻车。如果障碍物较大,应该暂停爬行,评估爬行器能否爬过,如若不能,应停止检测,以免发生翻车风险。如遇爬行器被障碍物卡住的情况,先停止爬行,将电缆线从电缆盘上拉出1到2米,然后再开始爬行,如仍然不能够通过,可先后退,然后调整方向反复尝试。在实施检测的过程中,请选择合理的灯光亮度,避免光源过度发热。管道机器人设备在实施检测的过程中,应根据规范要求操作设备。江苏振祺建设工程有限公司:市政公用工程施工总承包叁级。嘉兴开挖修复管道检测与评估客服电话
积水面积质量可靠的CCTV管道检测机器人的外部防护防水等级较高,可以应对基本的浸水作业。福建排水管道检测与评估服务电话
管道机器人设备在实施检测的过程中,应根据规范要求操作设备,在遇到障碍物时,应该降低抬升高度(降低重心),调整车速,防止翻车。如果障碍物较大,应该暂停爬行,评估爬行器能否爬过,如若不能,应停止检测,以免发生翻车风险。如遇爬行器被障碍物卡住的情况,先停止爬行,将电缆线从电缆盘上拉出1到2米,然后再开始爬行,如仍然不能够通过,可先后退,然后调整方向反复尝试。在实施检测的过程中,请选择合理的灯光亮度,避免光源过度发热。管道机器人设备在实施检测的过程中,应根据规范要求操作设备。在遇到障碍物时,应该降低抬升高度(降低重心),调整车速,防止翻车。如果障碍物较大,应该暂停爬行,评估爬行器能否爬过,如若不能,应停止检测,以免发生翻车风险。如遇爬行器被障碍物卡住的情况,先停止爬行,将电缆线从电缆盘上拉出1到2米,然后再开始爬行,如仍然不能够通过,可先后退,然后调整方向反复尝试。福建排水管道检测与评估服务电话