商机详情 -
南京灌胶机视觉点胶软件
四轴视觉点胶系统在自动化产线中扮演着更灵活的角色,在三轴基础上增加了一个旋转轴。这个额外的自由度允许点胶头或工作台进行角度调整,从而应对带有侧面或倾斜面的工件进行点胶作业。例如,在汽车电子连接器的密封点胶,或某些带有凹槽的金属外壳涂覆中,四轴系统通过旋转使胶嘴始终垂直于待涂胶表面,确保胶水均匀附着。系统的重点在于四轴的运动协调与视觉引导的同步,软件需要精确计算旋转角度与直线位移的复合轨迹,避免干涉并优化点胶效率。从设备维护角度看,旋转轴的机械精度需要定期校验,其传动部件的磨损会影响角度定位的准确性。对于设备制造商而言,选择一套成熟稳定的四轴视觉点胶系统意味着能够为客户拓展更复杂的工艺范围。深圳市旗众智能科技有限公司专注于为自动化设备制造企业提供运动控制与机器视觉一体化解决方案,其四轴视觉点胶系统凭借多项发明和软件著作权,实现了多轴协同控制的高稳定性和高重复精度,有效满足复杂三维路径的点胶需求。视觉点胶系统适配多种胶水类型,满足多样化生产场景需求。南京灌胶机视觉点胶软件

对于设备制造商而言,一套完整的视觉点胶软件方案远不止一个可安装的程序。它是一套针对特定生产工艺的综合性解决策略,涵盖从视觉定位、路径规划、运动控制到工艺参数库管理的完整闭环。优良的方案深入理解工艺痛点,解决微小元器件的精确对位点胶、复杂三维曲面上的均匀涂胶、多品种小批量生产的换线效率等问题。方案提供商根据点胶机结构、运动平台类型、相机和光源选型,进行软硬件的协同设计与调试,确保整个系统作为整体发挥性能。方案中还应包含针对不同材质、不同胶水的工艺参数预设与优化建议,帮助快速实现量产。深圳市旗众智能科技有限公司专注于为设备制造商提供运动控制与机器视觉一体化解决方案,基于对视觉点胶工艺的深刻理解,为客户量身定制从重点软件到系统集成的全套方案,其研发团队具备强大的底层技术开发能力。南京灌胶机视觉点胶软件落地式视觉点胶系统的稳定性与空间利用率,是判断供应商优劣的重要参考。

视觉点胶系统在智能卡生产中的应用优化了工艺流程。银行卡、身份证等卡片的芯片封装需要在卡基内部点涂固定胶,既要保证芯片牢固,又不能影响卡片的柔韧性。传统点胶方式依赖模板定位,容易因卡基厚度偏差导致点胶位置不准,而视觉点胶系统通过高清相机成像技术,能识别芯片的实际位置,控制胶水注入量。在接触式芯片的安装中,系统还能配合压力传感器,确保点胶后芯片与卡基表面平齐,避免后续压合工序出现凸起。某制卡企业应用后,芯片脱落的不良率从 2% 降至 0.3%,单班产能提升了 50%。
当生产空间有限或需要针对小型工件进行精密点胶时,小视野视觉点胶系统展现出独特价值。该系统通常配备高倍率镜头和精密光源,视野范围虽小但分辨率极高,能够清晰捕捉微米级的特征细节。特别适用于LED封装内部的荧光胶点涂、微型传感器封装或精密五金饰品粘接等场合,这些应用中胶点的直径、高度和位置都有极其严格的要求。小视野系统通过强大的图像处理算法,稳定识别对比度低、特征微小的目标,并引导点胶头完成亚像素级别的精确对位。其软件通常具备丰富的标定和补偿功能,以应对光学畸变和机械误差。对于设备制造商而言,集成一套成熟稳定的小视野视觉点胶系统,能大幅降低在超精密点胶应用上的开发门槛和技术风险。深圳市旗众智能科技有限公司凭借专业的研发团队和与高校的产学研合作,在小视野视觉系统的光学设计、图像算法和运动控制协同方面积累了深厚经验,为客户提供可靠的超精密点胶解决方案。视觉点胶系统支持二维码识别,自动匹配对应产品点胶程序。
现代自动化生产线追求效率与空间的优化,一体化视觉点胶系统将运动控制卡、机器视觉模块、点胶驱动单元及人机交互界面高度集成于一个紧凑的硬件平台或软件框架内,实现了从“看到”到“执行”的无缝衔接。这种一体化设计减少了传统方案中多设备、多供应商带来的复杂接线、通讯延迟与兼容性风险。系统内部采用高速总线进行数据交换,视觉定位结果能够以极低的延时反馈给运动控制器,从而驱动点胶头进行实时轨迹修正,特别适合高速在线点胶应用。用户只需通过一个软件平台即可完成相机标定、视觉模板制作、点胶路径编辑、工艺参数设置及生产监控所有操作,降低了系统调试与操作维护的难度。一体化的架构也意味着更稳定的系统表现和更便捷的售后服务,当生产需求变化时,升级或扩展功能也更为集中高效。对于设备制造商而言,采用一体化视觉点胶系统能够缩短整机开发周期,提升设备运行的稳定性和可靠性。深圳市旗众智能科技有限公司专注于智能装备运动控制系统与机器视觉系统的开发,其提供的一体化视觉点胶解决方案,集成了自主研发的运动控制与视觉处理重点,服务于自动化设备制造企业。视觉点胶系统支持远程诊断,方便工程师快速解决故障。南京灌胶机视觉点胶软件
视觉点胶系统通过图像分析,快速识别产品缺陷并提示。南京灌胶机视觉点胶软件
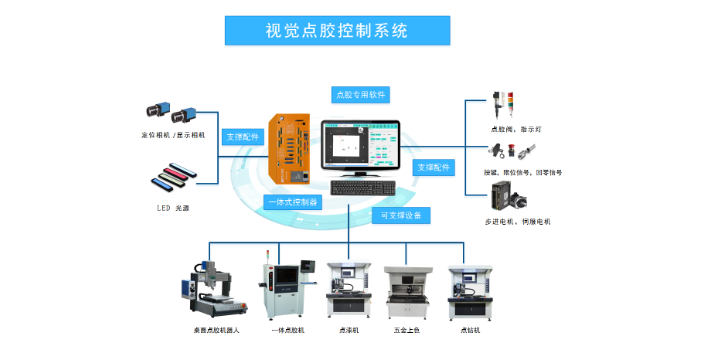
视觉点胶系统,作为旗众智能精心打造的创新产品,融合了先进的机器视觉技术与精密的运动控制技术。在工作伊始,其高精度的工业相机迅速捕捉工件的图像信息,凭借强大的图像处理算法,能够识别工件的形状、位置以及需要点胶的区域。无论是复杂的异形工件,还是微小精细的电子元件,都能被系统清晰辨认。紧接着,运动控制系统依据视觉识别的结果,精确操控点胶头的移动轨迹,将胶水以恰到好处的量和位置施加在工件上。整个过程一气呵成,提升了点胶的准确性和效率,为众多生产企业解决了传统点胶方式难以应对的复杂工况难题。南京灌胶机视觉点胶软件