商机详情 -
上海桁架机械手行走
活动板16的顶面上均匀分布开设有若干个贯穿其上下侧壁的横槽24,横槽24与圆槽贯穿设置,横槽24内活动连接有夹板25,横槽24的侧壁上均开设有第二滑槽32,第二滑槽32呈横向设置,夹板25的底面上固定连接有第二滑块33,第二滑块33的两侧均插入到第二滑槽32内,第二滑块33与第二滑槽32之间活动连接设置,第二滑块33远离活动板16中心一侧的侧壁上固定连接有弹簧34,弹簧34远离第二滑块33一端固定连接在横槽24的侧壁上,实现夹紧功能,夹板25上设置有橡胶垫35,橡胶垫35固定连接在夹板25靠近活动板16中心一侧的侧壁上,使得固定更加牢靠稳定,夹板25上活动连接有连杆26,圆槽内设置有顶板27,顶板27的底面中心固定连接有圆杆28,圆杆28贯穿活动板16的底面固定连接有底板29,圆杆28与活动板16之间活动连接设置,连杆26远离夹板25一端均与底板29之间活动连接设置,可以方便的对油底壳实现固定操作,固定方便快捷,圆环板9的外侧壁靠近顶面固定连接有第二齿轮18,圆孔靠近转动板7侧壁处均有分布开设有若干个凹槽19,凹槽19内设置有圆轴20,圆轴20的上下端均固定连接在凹槽19的上下侧壁上,圆轴20的侧壁上活动连接有第三齿轮21,第三齿轮21与第二齿轮18之间相互啮合设置。桁架机械手设备,就选浙江勃展工业自动化设备有限公司。上海桁架机械手行走
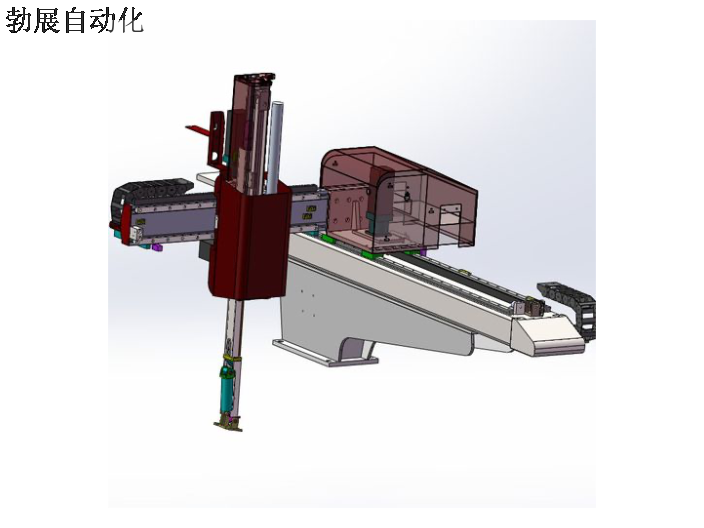
都属于本实用新型保护的范围。如图1-5所示,一种全自动数控机床加工的桁架机械手,包括上下一体立柱1,所述上下一体立柱1的下端固定安装有连接机床基座的固定装置2,所述上下一体立柱1的上端固定安装有机械手横梁3,所述机械手横梁3上滑动安装有xyz轴模组总成4,所述xyz轴模组总成4的下方设有机械手臂5,所述机械手臂5上安装有手臂末端夹爪6,所述固定装置2的上方固定安装有料仓7。具体的,所述xyz轴模组总成4包括x轴左右移动伺服模组9、y轴前后移动伺服模组10和z轴上下移动伺服模组11。具体的,所述手臂末端夹爪6包含一个90度旋转气缸12、二个带检测功能的中通弹簧推杆式三爪气缸13和手爪夹具14。具体的,所述料仓7包括一个移动料盘的伺服模组15、产品位置定位模板16及一个气缸带动排料杆的卸料装置17。具体的,所述上下一体立柱1的后侧面固定安装有plc控制器8。使用时,机械手从料仓7将毛坯零件取出,迅速将零件运送到机床的上方,天窗开启后将零件精确送到机床的夹具里,带检测功能的中通弹簧推杆式三爪气缸13松开并检测产品是否送到机床夹具里,弹簧推杆灯闪亮,证明产品到位,机床自动夹紧加工产品,机械手退回到料仓7拿好零件运行到天窗处等待机床加工完产品。徐州重型桁架机械手浙江勃展工业自动化设备有限公司为您提供 桁架机械手设备,有想法的不要错过哦!

术语“同轴”、“底部”、“一端”、“顶部”、“中部”、“另一端”、“上”、“一侧”、“顶部”、“内”、“前部”、“”、“两端”等指示的方位或位置关系为基于附图所示的方位或位置关系,是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“”、“第二”、“第三”、“第四”用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量,由此,限定有“”、“第二”、“第三”、“第四”的特征可以明示或者隐含地包括至少一个该特征。在本实用新型中,除非另有明确的规定和限定,术语“安装”、“设置”、“连接”、“固定”、“旋接”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。尽管已经示出和描述了本实用新型的实施例。
实施例1,如图1-2所示:一种桁架机械手的抬升装置,包括底板1和机械手主体2,底板1的底部外壁阵列安装有金属滑轮,可以滑动整体装置,以便于进行移动使用,底板1的顶部外壁固定安装有支架3,支架3的顶部固定安装有顶板8,底板1、支架3和顶板8整体呈工字形设置,顶板8的上方设置有伺服电机11,且顶板8的顶部外壁固定安装有电机安装架10,伺服电机11安装在电机安装架10上,伺服电机11的输出轴外壁固定安装有主轴12,伺服电机11设置在顶板8的顶部中心上方,主轴12的外壁通过轴承活动连接顶板8,使得主轴12的转动,变得更加的稳定,主轴12的底端穿过顶板8,且底端外壁固定安装有主齿轮15,主轴12的左右两侧均设置有辅轴9,两个辅轴9的顶端均活动连接顶板8的底部外壁,且两个辅轴9的外壁均固定安装有与主齿轮15相互匹配的传动齿轮13,传动齿轮13与主齿轮15啮合,两个辅轴9的底端外壁均固定安装有钢丝线辊14,钢丝线辊14上缠绕有钢丝绳6,顶板8的底部外壁以主轴12为中心呈左右对称安装有导轮7,钢丝绳6的套设在导轮7的凹槽内,使得钢丝绳6的运动变得更加平稳,受力合理,易于控制,支架3的内壁均固定安装有卡轨5,卡轨5的内腔中设置有导块4,每个导块4的顶部外壁均焊接有圆环。桁架机械手设备,就选浙江勃展工业自动化设备有限公司,让您满意,欢迎新老客户来电!

产品品牌发货城市-有效期至长期有效最小起订1产品单价面议工作适应性极强、定制化行程据机器人第七轴研发厂家介绍,在此种设备未普及应用之前,诸多行业中浪费了大量的人力,同时也降低了工作的精细性;而全封闭式机器人第七轴的工作适应性极强,通常情况下它是根据实际应用场景,对有效行程进行调整定制,所以使它的工作配合性更强。二、控制简单,安装灵活,精度高据悉,该种行业内的全封闭式机器人第七轴由自动化设备直接控制,所以在非特殊情况下无需增加额外控制系统,这既使企业节省成本,也提高了安装效率,使控制更加简单。多数机电设备都需要对其初始位置进行设置,若相关的部件不处于初始位置就不能正常启动设备。控制柜,其相当与桁架机器人机械手的大脑作用,通过工业控制器,采集各传感器或按钮的输入信号,来发送指令给各执行元件按既定的动作去执行。当机械设备受程序控制时,都会有相应的初始位置,初始位置是设备运行的起点。在对设备初始位置进行设置的过程中,要结合设备的实际运行情况及其特点,进行有根据的设置。机械手所在的初始位置要使所有的气缸活塞都处于缩回的状态,因为机械手的动作完成都是通过气缸进行的自动生产线的发展。桁架机械手设备,就选浙江勃展工业自动化设备有限公司,让您满意,期待您的光临!长宁区桁架机械手结构
浙江勃展工业自动化设备有限公司是一家专业提供桁架机械手设备的公司,有需求可以来电咨询!上海桁架机械手行走
本实用新型涉及机械手技术领域,具体为一种便于拆卸的桁架机械手。背景技术:现有技术中,桁架机械手大多结构都比较死板,不能轻易进行拆卸,所以在移动搬迁时存在诸多不便,所以本实用新型提供一种便于拆卸的桁架机械手来解决上述问题。技术实现要素:本实用新型的目的在于提供一种便于拆卸的桁架机械手,以解决上述背景技术中提出的问题。为实现上述目的,本实用新型提供如下技术方案:一种便于拆卸的桁架机械手,包括机械手固定板,所述机械手固定板的一侧面上设有机械手本体,所述机械手本体所在的机械手固定板的一侧面板上螺钉连接有电机固定壳,所述电机固定壳和机械手固定板之间夹持有电机,所述电机的输出端穿过机械手固定板连接有传动齿轮,所述传动齿轮啮合连接有齿槽板,所述齿槽板的上下两侧面板上均贴合设置有限位轮,所述限位轮通过若干轴承连接有固定栓,所述固定栓固定在机械手固定板上,所述限位轮与机械手固定板之间的固定栓上插接有挡板,所述挡板与机械手固定板之间的固定栓上设有垫环,所述固定栓远离机械手固定板的一端设有压板,所述机械手本体所在的机械手固定板的一侧面板四拐角处均焊接有固定块,所述固定块嵌合连接有卡键。上海桁架机械手行走
浙江勃展工业自动化设备有限公司汇集了大量的优秀人才,集企业奇思,创经济奇迹,一群有梦想有朝气的团队不断在前进的道路上开创新天地,绘画新蓝图,在浙江省等地区的机械及行业设备中始终保持良好的信誉,信奉着“争取每一个客户不容易,失去每一个用户很简单”的理念,市场是企业的方向,质量是企业的生命,在公司有效方针的领导下,全体上下,团结一致,共同进退,**协力把各方面工作做得更好,努力开创工作的新局面,公司的新高度,未来浙江勃展工业自动化设备供应和您一起奔向更美好的未来,即使现在有一点小小的成绩,也不足以骄傲,过去的种种都已成为昨日我们只有总结经验,才能继续上路,让我们一起点燃新的希望,放飞新的梦想!