商机详情 -
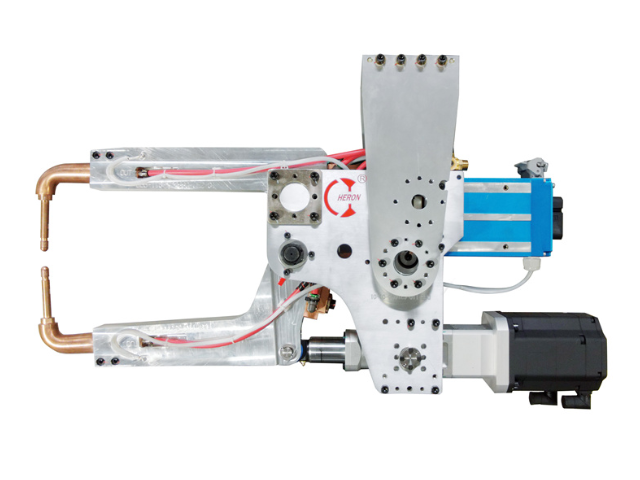
石家庄X型机器人焊钳供应商
机器人焊钳在焊接过程中,材料变形是一个常见的问题。这是因为焊接时会产生高温,导致材料膨胀和收缩,从而导致变形。为了防止材料变形,可以采取以下措施:1.控制焊接温度:通过控制焊接温度,可以减少材料的膨胀和收缩。可以使用低温焊接或者采用预热的方法来控制焊接温度。2.采用适当的焊接技术:不同的焊接技术对材料的变形影响不同。选择适当的焊接技术可以减少材料的变形。例如,采用点焊或者激光焊接可以减少材料的变形。3.采用适当的焊接参数:焊接参数的选择对材料的变形也有很大的影响。选择适当的焊接参数可以减少材料的变形。例如,选择适当的焊接速度和焊接电流可以减少材料的变形。4.采用适当的夹具:夹具的选择对材料的变形也有很大的影响。选择适当的夹具可以减少材料的变形。例如,采用弹性夹具可以减少材料的变形。总之,机器人焊钳在焊接过程中,通过控制焊接温度、选择适当的焊接技术和参数、以及选择适当的夹具,可以有效地防止材料的变形。机器人焊钳的操作过程中不会产生有害气体和噪音,对环境和人体健康无害。石家庄X型机器人焊钳供应商

机器人焊钳对提高产品质量有很大的影响。首先,机器人焊钳可以提高焊接的精度和一致性。机器人焊钳可以精确地控制焊接的位置、速度和力度,从而确保焊接的质量和一致性。这可以减少焊接缺陷的数量,提高产品的质量。其次,机器人焊钳可以提高生产效率和生产速度。机器人焊钳可以在短时间内完成大量的焊接任务,从而提高生产效率和生产速度。这可以减少生产时间和成本,提高产品的生产效率和竞争力。除此之外,机器人焊钳可以提高工作环境的安全性。机器人焊钳可以在危险的环境中工作,如高温、高压、有毒气体等环境中。这可以减少工人的伤害和事故,提高工作环境的安全性。综上所述,机器人焊钳对提高产品质量有很大的影响。它可以提高焊接的精度和一致性,提高生产效率和生产速度,提高工作环境的安全性。这可以帮助企业提高产品的质量和竞争力,从而获得更多的市场份额和利润。广州X型机器人焊钳电路图机器人焊钳是一种高效、精确的自动化焊接设备,能够大幅提高生产效率。
机器人焊钳在焊接时的热影响区是指焊接过程中受到热影响的区域。这个区域通常是焊接接头周围的一定范围内,包括焊接接头、母材和热影响区。焊接时,焊钳会产生高温,使接头和母材局部熔化,形成焊缝。同时,高温也会对接头周围的母材产生热影响,使其发生物理和化学变化,从而影响接头的性能。热影响区的大小和形状取决于焊接过程中的热输入、焊接速度、焊接材料和焊接参数等因素。一般来说,焊接速度越快,热影响区越小;热输入越大,热影响区越大。热影响区的存在对焊接接头的性能有着重要的影响。如果热影响区过大,会导致接头的硬度、韧性和耐腐蚀性等性能下降,从而影响焊接接头的质量。因此,在焊接过程中,需要通过控制焊接参数和焊接速度等措施来减小热影响区的大小,以保证焊接接头的质量。
机器人焊钳是自动化焊接生产线中的重要组成部分,其维护保养对于保证生产线的稳定运行和延长设备寿命至关重要。以下是机器人焊钳的维护保养方法:1.定期清洁:机器人焊钳在使用过程中会积累焊渣和灰尘等杂物,应定期清洁,以保证焊接质量和设备寿命。2.润滑保养:机器人焊钳的各个部位需要定期润滑,以减少磨损和摩擦,延长设备寿命。3.检查电气系统:机器人焊钳的电气系统需要定期检查,以确保电气设备的正常运行和安全性。4.检查机械系统:机器人焊钳的机械系统需要定期检查,以确保机械设备的正常运行和安全性。5.更换易损件:机器人焊钳的易损件需要定期更换,以保证设备的正常运行和延长设备寿命。6.定期维护:机器人焊钳需要定期进行维护,以确保设备的正常运行和延长设备寿命。维护保养是机器人焊钳正常运行和延长设备寿命的重要保障,企业应该制定科学合理的维护保养计划,并按照计划进行维护保养工作。机器人焊钳的焊接质量稳定可靠,能够保证焊接接头的质量和强度。

机器人焊钳的智能化程度可以从以下几个方面进行评估:1.精度和稳定性:机器人焊钳的智能化程度可以通过其精度和稳定性来评估。高精度和稳定性的机器人可以更准确地执行焊接任务,从而提高生产效率和产品质量。2.自主性:机器人焊钳的自主性也是评估其智能化程度的重要指标。具有自主决策能力的机器人可以根据不同的焊接任务和环境条件进行自主调整和优化,提高生产效率和灵活性。3.感知能力:机器人焊钳的感知能力也是评估其智能化程度的重要指标。具有感知能力的机器人可以通过传感器和视觉系统获取周围环境的信息,从而更好地适应不同的焊接任务和环境条件。4.交互能力:机器人焊钳的交互能力也是评估其智能化程度的重要指标。具有交互能力的机器人可以与人类操作员进行交互,从而更好地实现人机协作,提高生产效率和安全性。综上所述,机器人焊钳的智能化程度可以从精度和稳定性、自主性、感知能力和交互能力等多个方面进行评估。机器人焊钳采用先进的自动化技术,能够实现高速、高精度的焊接操作。西安焊装线机器人焊钳型号
机器人焊钳的操作过程中,能够实现数据记录和分析,为生产管理提供依据。石家庄X型机器人焊钳供应商
焊接机器人的结构组成:1、机器人本体:焊接机器人的机器人本体是由伺服电机驱动,六个关节进行协调运动,提高了焊接的灵活度,精确地保证机械手的运动精度以及运动轨迹。2、焊接电源:焊接机器人需要具备单独的电源,这样设备启动的时候不会出现电压电流负荷的情况,保护全自动焊接机器人本体不受损害。3、控制系统。控制系统是焊接机器人的重要组成部分,相当于人类的大脑,可以发出控制指令,控制柜中具备输入和输出功能,现阶段焊接市场中的焊接机器人采用的是离线编程,操作人员需要将编程程序以及辅助设备程序输入到控制系统中。石家庄X型机器人焊钳供应商