商机详情 -
松江区冲压桁架机械手
重型桁架式机械手优点:采用**度结构钢,整体强度高,不易振动摇晃。滚轮导轨运动机构,承载能力极强,刚性可以。安装调整要求低,相比于繁杂的关节机器人,结构设计便于人员理解、操作简单、维护方便。使用周期长,不会像普通直线导轨滑块易受加工精度及润滑影响失效损坏。便于维护,导轨极易维护,即使损坏更换也极其方便。可配置为全闭环系统,即会实时检测机械手控制系统发出指令和实际位置是否一致(如非全闭环、齿轮损坏等实际不移动不准确,而控制系统无法感知),Z轴检测到往下掉时可机械锁止,防止发生安全事故。桁架机械手设备,就选浙江勃展工业自动化设备有限公司,让您满意,期待您的光临!松江区冲压桁架机械手
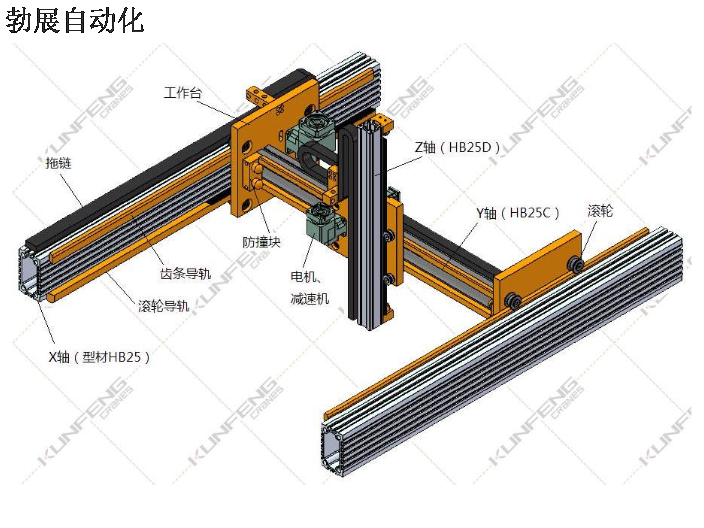
采用桁架机械手输送的柔性加工自动线,可以提高数控企业的生产效率,推动由桁架式机械手输送的柔性加工自动线开始向国际水准迈进。数控机床机械手桁架机械手主要实现机床制造过程的完全自动化,并采用了集成加工技术,适用于生产线的上下料、工件翻转、工件转序等。桁架机械手由主体、驱动系统和控制系统三个基本部分组成。按机器人结构分类为直角坐标型,机械手沿二维直角坐标系移动。主体部分通常采用龙门式结构,由y向横梁与导轨、z向滑枕、十字滑座、立柱、过渡连接板和基座等部分组成,z向的直线运动皆为交流伺服电动机通过蜗轮减速器驱动齿轮与y向横梁、z向滑枕上固定的齿条作滚动,驱动移动部件沿导轨快速运动。移动部件为质量较轻的十字滑座和z向滑枕,滑枕采用由铝合金拉制的型材。横梁采用方钢型材,在横梁上安装有导轨和齿条,通过滚轮与导轨接触,整个机械手都悬挂在其上。 安徽桁架机械手码垛视频浙江勃展工业自动化设备有限公司致力于提供 桁架机械手设备,欢迎您的来电!

气动助力机械手设计需要注意什么?为了实现更好的自动化性能,气动助力机械手应该注意以下几个方面:气动助力机械手制造的升降应与人工移动物体的速度相结合,一般在15米/分以内,具体应根据实际需要进行设计。速度太慢会影响其工作效率。如果速度太快,很容易造成自身的晃动和摆动,影响设备的稳定性。负载时,手动操作的推拉力一般为3-5公斤。如果规定操作的推拉力很小,相反,物体会产生惯性,影响助力机械手的稳定性,所以要有克服惯性的力,所以在设计过程中要注意在平衡臂的各个关节处给予适当的摩擦力。
桁架机器人,又称:桁架机械手,在工厂自动化中大部分应用自动上下料、自动堆垛等方面工作;滚轮导轨和齿轮齿条传动系统,在桁架机器人/桁架机械手中普遍采用:实现滚轮导轨和齿轮齿条传动系统的自动润滑,方便维修保养工作和延长使用寿命;人工方式保养有几个特点:人工保养随意性,没有具体保养的时间观念性;错误的保养方法;机器关键部位保养不到位;耗费人力工时;不能确定注脂状况,油脂多与少。停机维护保养降低生产效益。综合上述人工保养方式的缺陷与不足。 浙江勃展工业自动化设备有限公司是一家专业提供 桁架机械手设备的公司,欢迎您的来电!

桁架机械手是一种建立在直角x,y,z三坐标系统基础上,对工件进行工位调整,或实现工件的轨迹运动等功能的全自动工业设备。然而现有的桁架机械手上竖直方向的传动齿轮与减速机输出端多是直接进行安装的,使得齿轮的受力状况较为复杂,且在传动过程中由于导向部件较为单一,使得齿轮以及减速机的传动稳定性较差,进而降低机械手上的减速机以及齿轮使用寿命,因此急需一种新型的桁架机械手来解决现有问题。技术实现要素:要解决的技术问题为了克服现有技术不足,现提出桁架机械手,解决了现有的桁架机械手上竖直方向的传动齿轮与减速机输出端多是直接进行安装的,使得齿轮的受力状况较为复杂,且在传动过程中由于导向部件较为单一,使得齿轮以及减速机的传动稳定性较差,进而降低机械手上的减速机以及齿轮使用寿命的问题。技术方案本实用新型通过如下技术方案实现:本实用新型提出了桁架机械手,包括传动架、轴承固定座以及直线导轨一,所述传动架上端一侧通过螺栓连接有输入马达,所述输入马达的传动输出端通过螺栓连接有减速机,所述减速机的传动输出端通过键连接有齿轮。 浙江勃展工业自动化设备有限公司是一家专业提供 桁架机械手设备的公司,欢迎新老客户来电!安徽桁架机械手码垛视频
浙江勃展工业自动化设备有限公司是一家专业提供 桁架机械手设备的公司。松江区冲压桁架机械手
上下料桁架机械手通常用作机床或其他机器的附加装置,如在主动机床或主动生产线上装卸和传递工件,在加工中心中更换刀具等,一般没有**的控制装置。使用上下料桁架机械手能够替代人从事单调、重复或繁重的体力劳动,完成生产的机械化和主动化,替代人在有害环境下的手工操作,改进劳动条件,确保人身安全,因而***使用于机械制造、冶金、电子、轻工和原子能等部分。数控机床上下料桁架机械手首要由于手部和运动机构组成。手部是用来抓持工件(或工具)的部件,依据被抓持物件的形状、尺寸、重量、资料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。运动机构使手部完成各种滚动(摇摆)、机械手配件移动或复合运动来完成规则的动作,改变被抓持物件的方位和姿势。松江区冲压桁架机械手