商机详情 -
云南数控车床桁架机械手
桁架机械手是能够实现自动控制、可重复编程、多功能、多自由度、运动自由度间成空间直角关系、多用途的操作机。具体所含有的特点有:可以在一些比较恶劣的环境中进行长期的工作。运行过程中,有着非常高的可靠性、速度以及精度性。可以根据用户所配套的操作工具不同,自身所携带来的功能也将会是不同。以上所述的三点,便是属于日常生活中市场上常见桁架机械手所含有的特点。桁架机械手的三大部件究竟是什么样子的。下面就请大家一起来看看吧!手部:桁架机械手的这个部位,往往是采用了丝杆螺母的结构。腕部:桁架机械手这个部位,则是采用了一个步进电机来带动涡轮杆。臂部:设备的这个部位,则是次用了滚珠丝杆来进行工作。以上所述的三点,便是属于在桁架机械手上的三部件样貌。桁架机械手设备,就选浙江勃展工业自动化设备有限公司,有想法的可以来电咨询!云南数控车床桁架机械手

桁架机械手的上料过程的动作:数控机械手臂沿X轴运动到工件取料位置的上方后停止,然后Z轴向下运动使张开的手爪刚好能抓住工件,闭合手抓住工件后,使Z轴再向上运动到指定高度,再沿X轴方向运动到工作台卡盘正上方、Z轴向下运动把工件装入到卡盘或工装内、卡盘夹紧、Z轴上升到超出机床防护罩上方、X轴再运动到等待位置等待机床完成工件的加工。桁架机械手下料过程的工作:完成工件加工后,X轴运动到卡盘的正上方,Z轴向下运动使手爪刚好能抓住工件,然后给气压使手爪合并抓住工件,卡盘松开,Z轴向上运动到合适的高度,沿X轴方向运动直至Z轴到放料位置,Z轴下降到放料点,张开手爪放料完成后提升Z轴,再转入下一个上料过程。以上工作安排的路径需要与桁架机械手配套的上下料机构如料盘、卡盘等的位置在同一条直线上,这样才能满足机械臂做X-Z两维运动的要求。如果实际情况较难满足,可以为机械臂再增加一个Y轴,这样数控机械臂就可以进行X-Y-Z三轴三维运动了,灵活度可以**增强。江苏双辽桁架机械手浙江勃展工业自动化设备有限公司为您提供桁架机械手设备,欢迎您的来电!

桁架机械手具备任意角度工作的优点也就是常说的自由度,自由度也就**机械手能够在一定范围内任意角度动作,此项优点也变成了桁架机械手可以满足较为精细化的商品的生产制造需求,也更是由于多自由度工作的优点让桁架机械手能够在许多高精密零部件生产厂家的车间中得到运用。 桁架机械的控制体系: 因为每一车间针对产品生产加工的工艺流程和操作方法是不一样的,因而桁架机械手在设计时就考虑到不一样场所的运用难题,因而桁架机械手是能够根据中后期的反复程序编写及其程序编写改变等方法,让机械手依照变更后的程序代码开展抓举和搬动的,自动控制保持全部的运作均按程序执行。
桁架机器人应用领域:多自由度运动,每个运动自由度之间的空间夹角为直角。自动控制的,可重复编程的,一切的运动均按程序运行。3灵活,多功用,因操作工具的不同功用也不同。高可靠性、高速度、高精度。可用于恶劣的环境,可长期工作,便于操作维修。各个机器行走轴,均可选用直线导轨,具有可高速运行,安装调试便利,适合长行程的长处。桁架机器人设备装备:框架结构:铝型材设备基础。运动组织:导轨,直线轴,伺服电机,丝杠。治具(机器手):定制。浙江勃展工业自动化设备有限公司为您提供桁架机械手设备,欢迎新老客户来电!
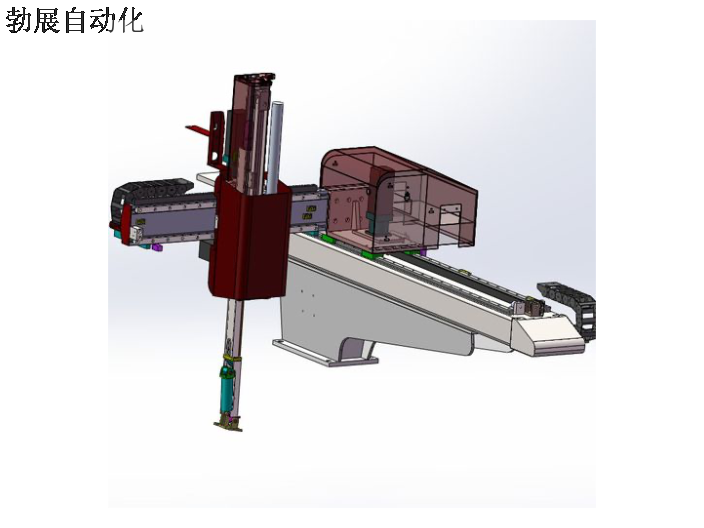
桁架机械手由三个基本部分组成:主体、驱动系统和控制系统。机器人根据其结构分为笛卡尔坐标系,机械手沿二维笛卡尔坐标系运动。主体部分通常采用龙门结构,由Y方向横梁及导轨、Z方向闸板、十字滑座、立柱、过渡连接板、底座等组成。Z方向直线运动为交流伺服电机,通过蜗轮减速器带动齿轮滚动,齿条固定在Y方向横梁和Z方向滑枕上,带动运动部件沿导轨快速移动。运动部件为轻型十字滑动座和Z向闸板,闸板采用铝合金型材。横梁采用方钢型材,导轨和机架安装在横梁上,通过滚轮与导轨接触,整个机械手悬挂在横梁上。桁架机械手设备,就选浙江勃展工业自动化设备有限公司,有需求可以来电咨询!江苏双辽桁架机械手
浙江勃展工业自动化设备有限公司致力于提供 桁架机械手设备,有需要可以联系我司哦!云南数控车床桁架机械手
机床上下料案例焊接机器人案例发那科R-0iB弧焊机器人机器人码垛机器人码垛系统是智能高效的码垛机器,因其灵巧轻便的机械机构及灵活的作业动作发那科M-10iA/12弧焊机器人机器人码垛机器人码垛系统是智能高效的码垛机器,因其灵巧轻便的机械机构及灵活的作业动作全自动码垛机码垛机主要是把包装后产品(箱袋桶),通过一连续的机械动作,按一定的排列顺序堆全自动码垛机码垛机主要是把包装后产品(箱袋桶),通过一连续的机械动作,按一定的排列顺机器人配件、整机销售机器人。 云南数控车床桁架机械手