商机详情 -
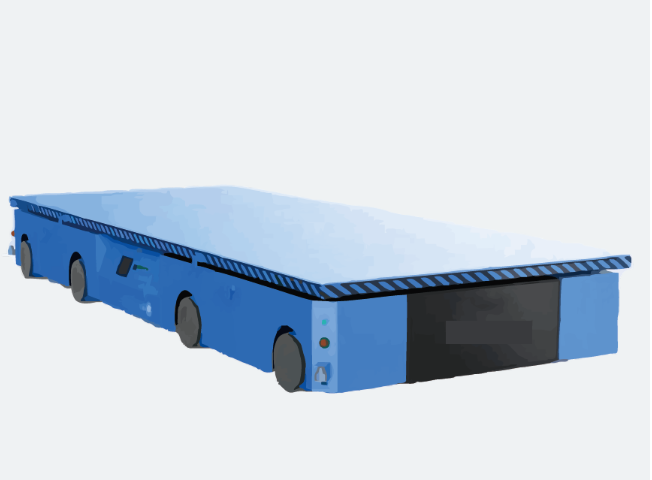
嘉兴重载AGV
1、AGV车体安装有急停按钮,用于AGV紧急停车。如发生紧急情况,操作人员按下该按钮,实现AGV紧急停车。急停按钮按下时AGV驱动轮电源将被立即切断并自动锁住,实现紧急停车。紧急情况解除后,旋开急停按钮,按下复位按钮,AGV继续运行。2、障碍物传感器AGV车体安装有安全激光扫描器,可实现一定范围内障碍物检测。障碍物检测区域可配置有多个区域可切换选择,分为安全警示区域和危险区域。当检测到障碍物进入安全警示区域时AGV减速运行并发出语音警报:当检测到障碍物进入到危险区域时,AGV自动停车,障碍物移走后恢复自动运行。防撞条防撞条接触到障碍物,AGV紧急停止。防撞条是AGV安全装置中的***一道防线。3、AGV防撞条是一种安全接触型开关。通过接触碰撞实现信号输出从而对AGV运动进行控制。接触开关能够提供比较大的安全保障,避免危险即使是轻微地碰撞,也可以激发反应,从而起到保护作用。当AGV车体受到外部挤压或触碰到部件的边高效AGV,提升仓储效率。嘉兴重载AGV
主要涉及三大技术要点:1.定位定位是确定AGV在工作环境中相对于全局坐标的位置及航向,是AGV导航导引的**基本环节。2.环境感知与建模为了实现AGV自主移动,需要根据多种传感器识别多种环境信息:如道路边界、地面情况、障碍物等。AGV通过环境感知确定前进方向中的可达区域和不可达区域,确定在环境中的相对位置,以及对动态障碍物运动进行预判,从而为局部路径规划提供依据。3.路径规划根据AGV掌握环境信息的程度不同,可分为两种类型:一个是基于环境信息已知的全局路径规划,另一个是基于传感器信息的局部路径规划,后者环境是未知或部分未知的,即障碍物的尺寸、形状和位置等信息必须通过传感器获取。湖州CE认证AGV排名AGV智能搬运,省时省力省心。
随着物流行业的快速发展,仓储物流的效率和准确性成为了企业追求的目标。为了提高仓储物流的效率和准确性,许多企业开始引入AGV自动导航技术。AGV是一种能够自主导航的无人驾驶车辆,通过激光导航、视觉导航和惯性导航等技术,实现了在仓储场景中的自动化操作。以某大型电子产品制造企业为例,该企业的仓储物流需求非常庞大,每天需要处理大量的原材料和成品。在引入AGV自动导航技术之前,该企业的仓储物流存在着一些问题,比如人工操作不准确、物料堆放混乱、物料损耗较高等。为了解决这些问题,该企业决定引入AGV自动导航技术。首先,该企业在仓库内部设置了一套完善的AGV自动导航系统。通过在仓库内部安装激光导航设备和传感器,AGV能够实时感知周围环境,并根据预设的路径规划进行导航。这样一来,AGV能够准确地将物料从一个地点运送到另一个地点,提高了物料的运输效率。其次,该企业利用AGV自动导航技术优化了仓库的布局和物料的堆放方式。通过在AGV上安装视觉导航设备,AGV能够识别并定位物料的位置,从而实现自动化的物料堆放。这样一来,不*减少了人工操作的错误率,还提高了物料的存储密度,节约了仓库的空间。此外。
此外,AGV还可以提高工作环境的安全性。它可以避免人与机械设备的接触,减少工作事故的发生。AGV在许多行业中得到了广泛应用。例如,AGV在物流仓储中用于货物搬运和分拣;在汽车制造中用于零部件的运输和装配;在医疗领域中用于药品和设备的运输等。随着技术的不断进步,AGV的应用领域将会越来越***,为工业生产带来更多的便利和效益。总之,AGV是一种自动导引车辆,它在工业生产中发挥着重要的作用。通过自主导航和避障功能,AGV可以代替人工搬运物料,提高生产效率和安全性。它具有减少人力成本、提高生产效率和改善工作环境安全性的优势。AGV在物流、制造、医疗等行业中得到了广泛应用,并将在未来继续发展和创新。借助AGV技术,企业可以实现更高效、更智能的物流管理。
一、适用范围本规程适用AGV使用人员的安全操作。操作人员应遵守《安全生产总则》、《设备操作规程》。二、岗位安全作业职责1.负责本岗位AGV日常开关机上线,AGV充电,应用软件开启,相关必要的点检。2.负责本岗位设备操作和相关作业,在作业和故障排除过程中,严格按照规定安全操作。3.负责本岗位设备设施及其安全装置的日常点检,确**岗位使用的设备设施及其安全装置完好有效,本岗位设备、设施出现故障应及时报修。4.负责本岗位事故和紧急情况的报告和现场处置。准确导航、智能避障,AGV让搬运工作更轻松。徐汇区二维码导航AGV对比
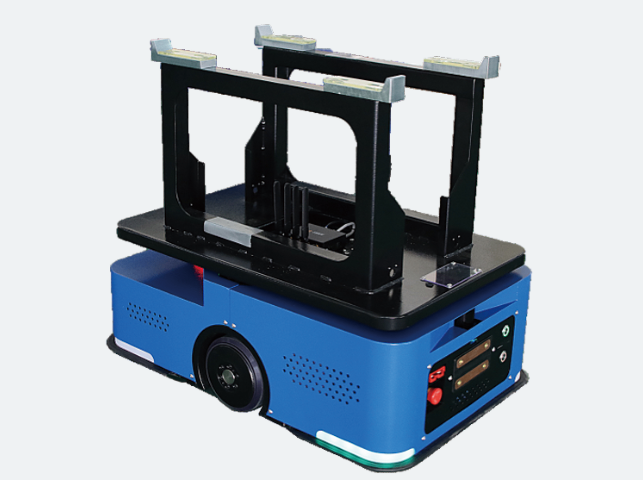
无人AGV,助力企业数字化转型。嘉兴重载AGV
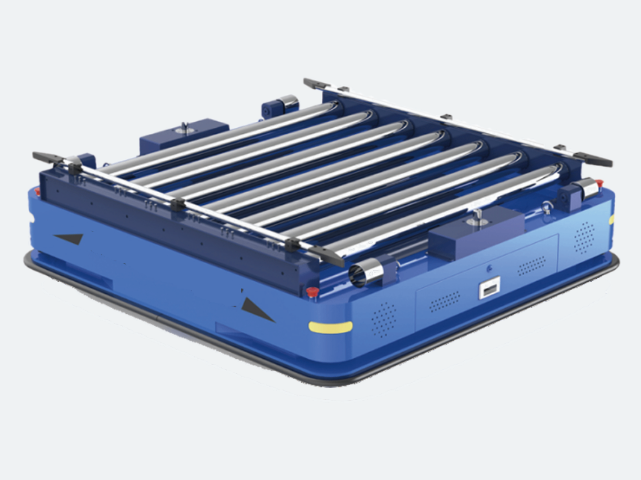
定位是确定移动机器人在运行环境中相对于全局坐标的位置及航向,是AGV导航的**基本环节。目前AGV定位方法分为:(1)卫星定位。它是一种以空间卫星为基础的高精度导航与定位系统。GPS定位系统用于AGV定位时存在近距离定位精度低等问题。(2)惯性定位。通过对固联在载体上的三轴加速度计、三轴陀螺仪进行积分,获得载体实时、连续的位置、速度、姿态等信息。但惯性误差经过积分之后都会产生无限的累积,因此纯惯性导航不适合长时间的精确定位。(3)电子地图匹配定位。利用图像处理技术,将实时获取的环境图像与基准图进行匹配,从而确定载体当前的位置,匹配的特征可以为设定的路标、特定的景象或是道路曲率。电子地图匹配特别适用于对机器人系统长时间的定位误差进行校准。以上定位方式中,惯性定位为相对定位方式,可以获得连续的位置、姿态信息,但存在累积误差;卫星定位、电子地图匹配等定位方式为***定位,可以获得精确的位置信息,但难以获得连续姿态信息。相对定位与***定位方式存在较强的互补性,通常采用将两者结合的组合定位方法。嘉兴重载AGV