商机详情 -
浙江机床机械手机器人
数控桁架机械手的日常保养,请注意以下几点:无论是在制造过程中,还是在数控桁架机械手的清洁保养过程中,都应注意避免使用纤维和短纤维。异物可能会进入数控车床的机械手连接处,影响性能或造成损坏。数控桁架机械手需要非常精密的设计结构,每一台都安装牢固,没有杂物,所以日常使用数控桁架机械手时要注意周围环境的清洁度。请勿让铁粉、灰尘等进入机械臂导轨。可能会导致导轨磨损、振动和噪音。数控桁架机械手开机时,注意不要给予强烈的冲击力或用重物撞击机械手的导轨。它会损坏数控车床机械手的内部或表面。它对机械手的运动精度产生不利影响。在使用数控桁架机械手时,操作人员在拿起设备前应将手上的汗水、污垢、油渍等成分清洗干净,而不是直接拿起,涂抹矿物油。这可以防止手的不良部件腐蚀桁架机械手。我们对细节的关注可以延长我们的机器手的使用寿命,并确保长期的稳定性和准确性。浙江勃展工业自动化设备有限公司致力于提供 机械手设备,欢迎新老客户致电!浙江机床机械手机器人

机械手主要有哪些优势使用?应用前景随着网络技巧的发展,机械手的联网操作问题也是以后发展的方向。工业机器人是近几十年发展起来的一种高科技自动化生产设备。工业机械手的是工业机器人的一个重要分支。它的特点是可通过编程来完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点,尤其体现了人的智能和适应性。机械手作业的准确性和各种环境中完成作业的能力,在国民经济各领域有着广阔的发展前景。市场需求机械手是在机械化,自动化生产过程中发展起来的一种新型装置。在现***产过程中,机械手被***的运用于自动生产线中,机械人的研制和生产已成为高技术领域内,迅速发展起来的一门新兴的技术,它更加促进了机械手的发展,使得机械手能更好地实现与机械化和自动化的有机结合。浙江机床机械手机器人安全可靠的机械手,保障生产人员远离危险。
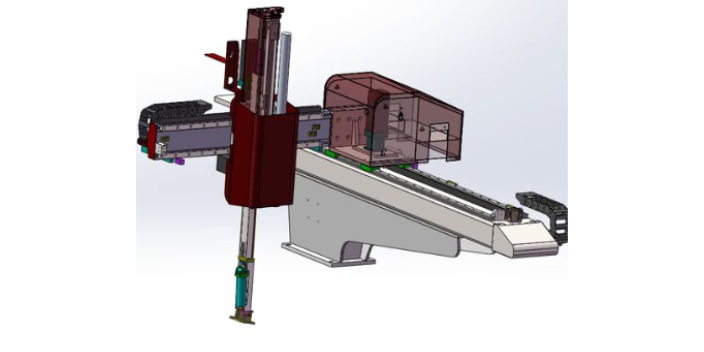
桁架机械手是数控车床自动上下料、卸料的自动化机械装置,其自动上下料基本工作原理是按照预先编写好的程序的指令,从料仓中将工件一个个抓取并移动到车床主轴上。工件卸入成品料仓,机械臂上附有一组转塔式双工位夹具,一组夹具负责上料,另一组夹具负责卸料。总之,机械手以自动装卸作业代替人工智能作业,从而提高效率,降低成本,增强企业竞争力。桁架机械手选型参数购买桁架机械手时,要了解桁架机械手的机械使用要求,如所实现的功能、负载重量、精度和夹持方式等,全部基于机器条件。
机械手控制的要素包括工作顺序、到达位置、动作时间、运动速度、加减速度等。机械手的控制分为点位控制和连续轨迹控制两种。重载龙门桁架机械手价格控制系统可根据动作的要求,设计采用数字顺序控制。它首先要编制程序加以存储,然后再根据规定的程序,控制机械手进行工作程序的存储方式有分离存储和集中存储两种。分离存储是将各种控制因素的信息分别存储于两种以上的存储装置中,如顺序信息存储于插销板、凸轮转鼓、穿孔带内;位置信息存储于时间继电器、定速回转鼓等;集中存储是将各种控制因素的信息全部存储于一种存储装置内,如磁带、磁鼓等。这种方式使用于顺序、位置、时间、速度等必须同时控制的场合,即连续控制的情况下使用。3.机械手设备,就选浙江勃展工业自动化设备有限公司,欢迎致电!

机械手主要有哪些优势使用?机械手可以减省工人、提高效率、降低成本、提高产品品质、安全性好、提升工厂形象。多关节机械手的优点是动作灵活、运动惯性小、通用性强、能抓取靠近机座的工件,并能绕过机体和工作机械之间的障碍物进行工作随着生产的需要,对多关节手臂的灵活性,定位精度及作业空间等提出越来越高的要求。多关节手臂也突破了传统的概念,其关节数量可以从三个到十几个甚至更多,其外形也不局限于像人的手臂,而根据不同的场台有所变化,多关节手臂的优良性能是单关节机械手所不能比拟的。浙江勃展工业自动化设备有限公司致力于提供机械手设备,欢迎您的来电哦!六轴机械手供应厂
模块化机械手设计,快速适应多样化工件搬运。浙江机床机械手机器人
桁架机械手的设计要点桁架机械手是自动化生产线的一个重要节点,不少自动化产线负责人找自动化上下料,自动码垛设备,桁架机械手就是一个不错的选择,下面亿思特和大家分享一下桁架机械手的设计要点:桁架机械手的结构应考虑各关节的限位开关和具有相应缓冲能力的机器限位块,以及驱动装置、传动机构等部件的安装。桁架机械手各关节轴尽量相互平行,相互垂直的轴尽量相交于一点,这样可以简化机械手运动学的正向和反向计算,便于机械手的控制。桁架机械手的臂相对于其共同的旋转轴应尽量保持重量平衡,这对减轻电机负载和提高机械手臂运动的反应速度很有好处。在设计桁架机械手的手臂时,应尽可能利用安装在机械手上的机电元器件的自重来减小机械手手臂的不平衡重量,并对剩余的不平衡重量设计平衡机构以达到平衡。平衡。必要时手臂的重量。浙江机床机械手机器人