商机详情 -
浙江全自动机械手设备
机械手控制的要素包括工作顺序、到达位置、动作时间、运动速度、加减速度等。机械手的控制分为点位控制和连续轨迹控制两种。重载龙门桁架机械手价格控制系统可根据动作的要求,设计采用数字顺序控制。它首先要编制程序加以存储,然后再根据规定的程序,控制机械手进行工作程序的存储方式有分离存储和集中存储两种。分离存储是将各种控制因素的信息分别存储于两种以上的存储装置中,如顺序信息存储于插销板、凸轮转鼓、穿孔带内;位置信息存储于时间继电器、定速回转鼓等;集中存储是将各种控制因素的信息全部存储于一种存储装置内,如磁带、磁鼓等。这种方式使用于顺序、位置、时间、速度等必须同时控制的场合,即连续控制的情况下使用。工业机器人连续六年成为大的应用市场,服务机器人需求潜力巨大。浙江全自动机械手设备
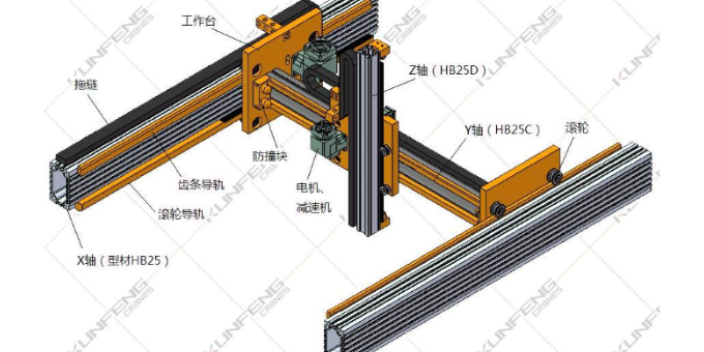
桁架机械手按连机的形式分成单联桁架机械手、双联机桁架机械手、多联机桁架机械手自动化生产线等几类款型;桁架机械手按负载重又分成轻形桁架机械手、超重型桁架机械手这二种款型。对于采用哪样桁架机械手款型,要依据商品的加工工艺和生产加工時间、商品的外形和净重及其客户的实际情况需用来选择。桁架机械手的优点:桁架机械手摆放于数控机床的侧立面,占有室内空间小,有利于数控机床的换刀、调试程序,维护保养等实际操作。此外桁架机械手工程造价较低,具备高性价比的优势。浙江全自动机械手设备轴组件是桁架机械手较为重要的组成部分。

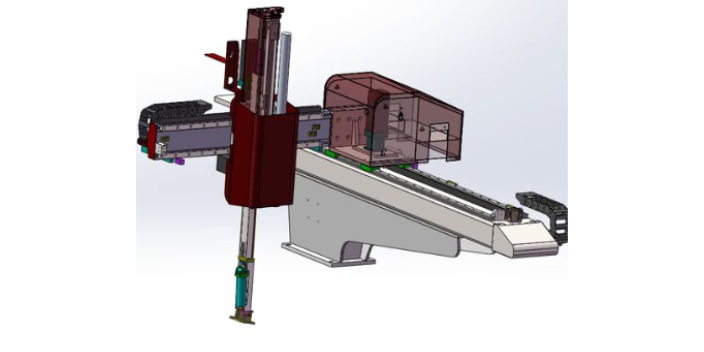
桁架机械手的设计要点桁架机械手是自动化生产线的一个重要节点,不少自动化产线负责人找自动化上下料,自动码垛设备,桁架机械手就是一个不错的选择,下面亿思特和大家分享一下桁架机械手的设计要点:桁架机械手的结构应考虑各关节的限位开关和具有相应缓冲能力的机器限位块,以及驱动装置、传动机构等部件的安装。桁架机械手各关节轴尽量相互平行,相互垂直的轴尽量相交于一点,这样可以简化机械手运动学的正向和反向计算,便于机械手的控制。桁架机械手的臂相对于其共同的旋转轴应尽量保持重量平衡,这对减轻电机负载和提高机械手臂运动的反应速度很有好处。在设计桁架机械手的手臂时,应尽可能利用安装在机械手上的机电元器件的自重来减小机械手手臂的不平衡重量,并对剩余的不平衡重量设计平衡机构以达到平衡。平衡。必要时手臂的重量。
机械手的形式特征有哪些?如当今的机械手主要以电机为动力。具有结构简单、重量轻、运行速度快、运行可靠、节能环保等优点。那么伺服机械手的形式特点是什么?直接类型是只允许手臂沿着三个笛卡尔坐标移动一条直线。即手臂只进行弹性提升和平移。运动比例图可以是直线、矩形平面或长方体。伺服机械手多自由度机械手是一种模拟人体肢体功能,自动控制肢体,按一定要求输送工件,操作工具的自动化生产设备。反向过渡型手臂中伺服机械手的操作水平是倒置的。结合手臂的弹性和变化,形成一个完整的反向过渡伺服机械手。它的特征被组合成一个圆圈,它的特征动作是相反的。为方便起见,这被称为反向。正反转伺服机械手具有动作直观性强、空间小、结构紧凑、工作规模大等优点。目前,大多数是一种类型。2.机械手设备,就选浙江勃展工业自动化设备有限公司,用户的信赖之选,欢迎来电!
机械手主要有哪些优势使用?机械手可以减省工人、提高效率、降低成本、提高产品品质、安全性好、提升工厂形象。多关节机械手的优点是动作灵活、运动惯性小、通用性强、能抓取靠近机座的工件,并能绕过机体和工作机械之间的障碍物进行工作随着生产的需要,对多关节手臂的灵活性,定位精度及作业空间等提出越来越高的要求。多关节手臂也突破了传统的概念,其关节数量可以从三个到十几个甚至更多,其外形也不局限于像人的手臂,而根据不同的场台有所变化,多关节手臂的优良性能是单关节机械手所不能比拟的。浙江勃展工业自动化设备有限公司为您提供机械手设备。浙江全自动机械手设备
桁架式机械手相当于人的臂,但桁架机械手依靠机器工作。浙江全自动机械手设备
桁架可以简单地看作是梁,因为其结构类似于机械结构梁,从机械分析的角度来看,机床桁架和简支梁可以比较,可以通过简支梁弯矩图分析桁架,增加机械手对桁架的力,我们可以参考以下桁架机械手机械分析图。数控桁架机械手在机床上要求高,效率高,可靠性强。桁架柱的选择应稳定桁架支撑,节省机床整体空间。对于大多数柱的结构,应选择钢结构。桁架机械手的作用是发挥运输的作用,即在上下材料的轨道和机床之间移动工件,从机床上取出加工零件,然后从轨道上取出要加工的零件,放在机床上。主要的动作就是:爪张开,抓取,升降,左右移动。对于机械手的手爪设计有很多种方案和形式,可以根据不同的需求,选择不同的设计方法。下图就是雷杰科技为客户设计的其中一种。浙江全自动机械手设备