商机详情 -
浙江非标机械手定制
桁架机械手和关节机器人两者的优点和缺点。数控机床上下料的全自动化实现形式主要是有桁架机械手和关节机器人这二种形式。那么,桁架机械手和关节机器人有什么不同?桁架机械手和关节机器人有哪些优点和不足之处?从桁架机械手和关节机器人的构造,使用性能,与数控机床的连机形式等几个方面来简单论述二者的差别及其不同的优点和缺点。桁架机械手和关节机器人两者的优点和缺点。数控机床上下料的全自动化实现形式主要是有桁架机械手和关节机器人这二种形式。那么,桁架机械手和关节机器人有什么不同?桁架机械手和关节机器人有哪些优点和不足之处?从桁架机械手和关节机器人的构造,使用性能,与数控机床的连机形式等几个方面来简单论述二者的差别及其不同的优点和缺点。浙江勃展工业自动化设备有限公司为您提供 机械手设备,期待您的光临!浙江非标机械手定制
机械手该如何做好日常保养工作?建议在桁架机械手使用后的一个月内每天清洁过滤设备。正常使用一个月后定期清洁设备。您可以根据气源的质量设置时间表。气管,数控桁架机械手连接接头是否有泄漏,定期检查旋转接头附近的气管有无磨损、接头、老化等情况。我们建议您在使用设备后的一个月内每天检查设备的正常使用情况。使用一个月后,应每周检查一次。承重连接为确保安全,所有承重连接螺栓和焊接部位应每周仔细检查一次。如果松动或损坏,应立即重新拧紧或更换。杭州桁架机械手直销浙江勃展工业自动化设备有限公司为您提供桁架机械手设备。
桁架机械手焊接四大条件介绍。数控桁架机械手对整体尺寸精度没有特别高的要求。配备偏差检测和焊接过程电弧跟踪功能可进行一定程度的修正2、应控制角焊缝装配间隙。否则,焊缝很容易穿透。如果有缝隙,在机器人焊接前进行人工打底,可以有效减少焊透的发生。对接焊缝根部间隙应稳定均匀。现代焊接机器人通常具有间隙感应能力。在一定程度上可以根据焊缝的实际根部间隙进行参数修正,但如果间隙过于不均匀,变异性大,焊缝的熔合和焊缝成型质量也会很不稳定。应控制机械手焊缝余量。比如一个角焊缝应该是10,而实际板边焊缝余量只有8,肯定会咬边
桁架机械手的使用日益***,单在使用过程中会遇到这样或者那样的问题,给企业造成一些不必要的损失,为了降低桁架机械手的故障率,接下来给大家分享一下桁架机械手在使用前后的注意事项。操作后的注意事项桁架机械手在完成工作操作后还需要注意做相关的检查维护工作。机械手在不工作的状态下或暂时停止时,要将制动开关恢复到原位,并且将机械手臂停止在空闲位置,以免机械手受外力的影响而牵动造成随意的旋转而使设备受损人员受伤。桁架机械手将会在未来发挥更加重要的作用。

原材料多样化第1大类是机械制造业包括机械加工、轻工机械等以金属材料作为加工的原料,如钟表、缝纫机、自行车和家用电器等耐用消费品的加工。第二大类是以农、林、牧、副及化工产品等非金属材料作为加工的原料,如食品机械中的糕点机械以农产品为主要原料;罐头、酿造机械以农、副产品为主要加工原料;制浆造纸机械以林产品和农副产品为原材料;皮革机械以畜牧产品为主要原料;陶瓷、玻璃、塑料机械则以矿物、化工产品为其原料。其表明自动化机械手及自动生产线应用领域广。1.浙江勃展工业自动化设备有限公司致力于提供机械手设备,欢迎来电咨询!舟山全自动机械手厂家
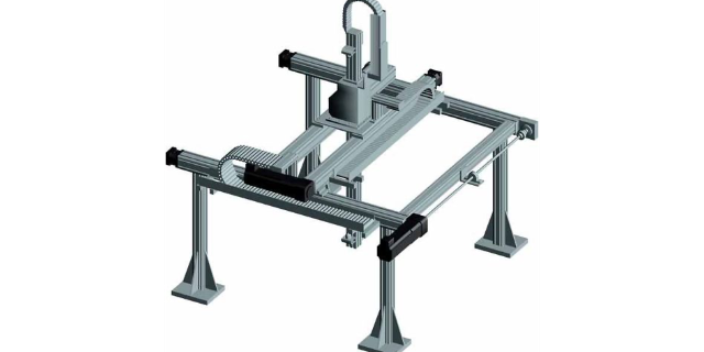
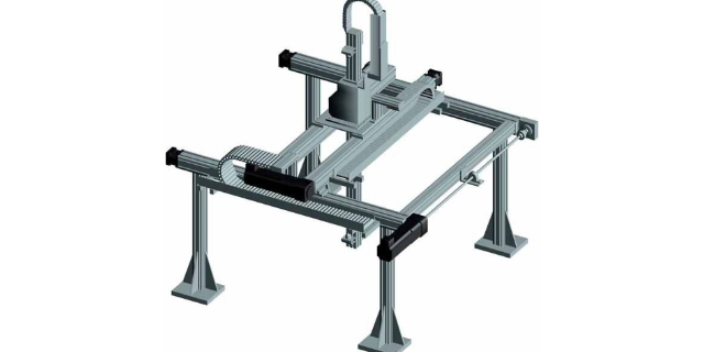
桁架机械手结构框架主要由立柱等多种结构件构成。它的主要作用是把各部分的轴抬高到了一定高度。浙江非标机械手定制
机械手控制的要素包括工作顺序、到达位置、动作时间、运动速度、加减速度等。机械手的控制分为点位控制和连续轨迹控制两种。重载龙门桁架机械手价格控制系统可根据动作的要求,设计采用数字顺序控制。它首先要编制程序加以存储,然后再根据规定的程序,控制机械手进行工作程序的存储方式有分离存储和集中存储两种。分离存储是将各种控制因素的信息分别存储于两种以上的存储装置中,如顺序信息存储于插销板、凸轮转鼓、穿孔带内;位置信息存储于时间继电器、定速回转鼓等;集中存储是将各种控制因素的信息全部存储于一种存储装置内,如磁带、磁鼓等。这种方式使用于顺序、位置、时间、速度等必须同时控制的场合,即连续控制的情况下使用。浙江非标机械手定制