商机详情 -
浙江工业机械手设备
桁架机械手的设计要点桁架机械手是自动化生产线的一个重要节点,不少自动化产线负责人找自动化上下料,自动码垛设备,桁架机械手就是一个不错的选择,下面亿思特和大家分享一下桁架机械手的设计要点:桁架机械手的结构应考虑各关节的限位开关和具有相应缓冲能力的机器限位块,以及驱动装置、传动机构等部件的安装。桁架机械手各关节轴尽量相互平行,相互垂直的轴尽量相交于一点,这样可以简化机械手运动学的正向和反向计算,便于机械手的控制。桁架机械手的臂相对于其共同的旋转轴应尽量保持重量平衡,这对减轻电机负载和提高机械手臂运动的反应速度很有好处。在设计桁架机械手的手臂时,应尽可能利用安装在机械手上的机电元器件的自重来减小机械手手臂的不平衡重量,并对剩余的不平衡重量设计平衡机构以达到平衡。平衡。必要时手臂的重量。机械手设备,就选浙江勃展工业自动化设备有限公司,用户的信赖之选,有想法可以来我司咨询!浙江工业机械手设备

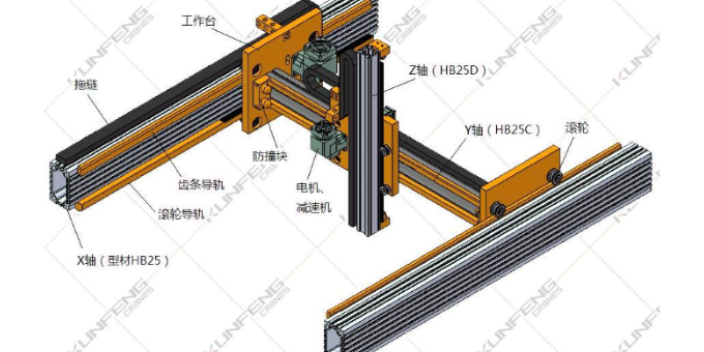
数控桁架机械手主要实现机床制造过程的*自动化,采用集成加工技术,适用于生产线上下材料、工件翻转、工件转动顺序等。桁架机械手由三个基本部分组成:主体、驱动系统和控制系统。根据机器人结构分类为直角坐标类型,机械手沿二维直角坐标系移动。主体部分通常采用由y到梁和导轨的龙门结构,z由滑枕、十字滑座、立柱、过渡连接板和基座组成,z交流伺服电机通过蜗轮减速器驱动齿轮和y向横梁,z将固定在滑枕上的齿条滚动,驱动移动部件沿导轨快速移动。移动部件为轻质十字滑座和Z滑枕,滑枕采用铝合金拉型材。横梁采用方形钢型材,横梁上安装有导轨和齿条。整个机械手通过滚轮与导轨接触悬挂在上面。衢州全自动机械手定制浙江勃展工业自动化设备有限公司是一家专业提供机械手设备的公司,欢迎新老客户来电!

桁架机械手的使用日益***,单在使用过程中会遇到这样或者那样的问题,给企业造成一些不必要的损失,为了降低桁架机械手的故障率,接下来给大家分享一下桁架机械手在使用前后的注意事项。操作后的注意事项桁架机械手在完成工作操作后还需要注意做相关的检查维护工作。机械手在不工作的状态下或暂时停止时,要将制动开关恢复到原位,并且将机械手臂停止在空闲位置,以免机械手受外力的影响而牵动造成随意的旋转而使设备受损人员受伤。
机械手的形式特征有哪些?如当今的机械手主要以电机为动力。具有结构简单、重量轻、运行速度快、运行可靠、节能环保等优点。那么伺服机械手的形式特点是什么?直接类型是只允许手臂沿着三个笛卡尔坐标移动一条直线。即手臂只进行弹性提升和平移。运动比例图可以是直线、矩形平面或长方体。伺服机械手多自由度机械手是一种模拟人体肢体功能,自动控制肢体,按一定要求输送工件,操作工具的自动化生产设备。反向过渡型手臂中伺服机械手的操作水平是倒置的。结合手臂的弹性和变化,形成一个完整的反向过渡伺服机械手。它的特征被组合成一个圆圈,它的特征动作是相反的。为方便起见,这被称为反向。正反转伺服机械手具有动作直观性强、空间小、结构紧凑、工作规模大等优点。目前,大多数是一种类型。手臂自重轻,其启动和停止的平稳性就好。
桁架机械手代替人工操作,可实现一人控制操作多台数控机床,节省企业劳动力;桁架机械手代替人工操作可以防止工业事故;桁架机械手的工作时间可以全天24小时不间断,**提高了产品生产的效率。以上三个方面减轻企业负担。桁架机械手的使用,似乎已经是企业工厂成为全自动机器、全自动工厂的重要一步。桁架机械手的模块化使操作更加简便,一个人可以控制多个机械手装置,提高了企业的生产效率,同时也为企业减轻了生产和人员的负担。尤其是在工厂生产成本越来越高的***,桁架机械手的作用变得越来越重要。浙江勃展工业自动化设备有限公司致力于提供 机械手设备,欢迎新老客户致电!温州自动化机械手报价
浙江勃展工业自动化设备有限公司是一家专业提供 机械手设备的公司,有想法可以来我司咨询!浙江工业机械手设备
数控桁架机械手的位置再现性是对精度的统计。即使在相同的环境、相同的条件、相同的动作、相同的命令下,机械手也可能不会*匹配每个动作的位置,从而产生一定的误差。但是,可控机械手的误差在一定范围内。在测试桁架机械手的位置再现性时,在不同的速度和方向进行的迭代测试越多,位置再现性评估就越准确。位置再现性不受负载变化的影响。因此,位置再现性指标通常被用作示教/再现模式下机器人水平的重要指标。机器手的准确度取决于驱动和反馈装置的分辨率。重复精度比单次精度更重要,如果定位精度不够准确,通常会看到可预测的固定误差,可以通过编程进行修复。再现性定义了通过重复一定次数的运行确定的随机误差范围。来自实验室的一整套气动伺服技术和气动伺服定位系统,此外还开发了微电子技术和***的控制技术。浙江工业机械手设备