商机详情 -
天津晶舟转换器价格
工作原理晶舟识别与定位:当晶舟进入晶舟转换器的工作区域时,定位与检测系统中的传感器会首先对晶舟进行识别和定位。通过激光传感器或视觉传感器等设备,获取晶舟的位置、姿态和形状等信息,并将这些数据传输给控制系统。抓取与搬运:控制系统根据接收到的晶舟位置信息,计算出机械臂的运动轨迹和动作参数,然后发送指令给驱动与传动系统。机械臂在驱动系统的带动下,按照预定的轨迹运动,其末端的夹具或吸盘到达晶舟上方后,通过机械夹紧或真空吸附等方式将晶舟牢牢抓取。随后,机械臂将晶舟从初始位置搬运到指定的目标位置。转换操作:在将晶舟搬运到目标位置后,晶舟转换器可能需要进行各种转换操作,如晶舟的翻转、旋转、堆叠等。这些操作同样由机械臂在控制系统的精确控制下完成。例如,通过机械臂的特定动作和夹具的配合,实现晶舟的180度翻转,以便对晶舟内的晶圆进行不同面的处理。晶舟转换器可用于连接工业设备到计算机,进行数据采集和监控。天津晶舟转换器价格

晶舟转换器在半导体设备集成中的应用:
在半导体设备集成过程中,晶舟转换器作为连接不同设备的关键枢纽,确保了整个生产系统的高效运行。在一条完整的半导体生产线中,包含光刻、蚀刻、离子注入、清洗等多种设备。晶舟转换器负责将晶圆在这些设备对应的晶舟间快速、精 zhun 转移。它与各设备的控制系统紧密对接,根据生产流程的指令,自动完成晶圆的装卸和转移操作。例如,当光刻设备完成一次光刻任务后,晶舟转换器迅速将晶圆转移至蚀刻设备,同时将新的待光刻晶圆送至光刻设备。这种无缝衔接的转移方式, da da 缩短了设备的等待时间,提高了整个生产线的生产效率。晶舟转换器的应用使得半导体设备集成更加紧密,优化了生产流程,提升了半导体制造企业的整体竞争力。 福建凡华晶舟转换器价格随着物联网、大数据等技术的普及,晶舟转换器也将迎来更多的智能化应用。

晶舟转换器的触摸屏是人机交互的重要界面,需要精心保养。每天使用柔软的湿布轻轻擦拭触摸屏表面,去除污渍和指纹。注意湿布不要过于湿润,避免水分渗入屏幕内部。若触摸屏表面有顽固污渍,可使用zhuan yong的触摸屏清洁剂,按照说明进行清洁。清洁过程中,避免使用尖锐物体刮擦屏幕,防止屏幕划伤。定期检查触摸屏的触摸灵敏度,若发现触摸不灵敏或出现误操作,可按照设备说明书进行校准。做好触摸屏保养,能确保操作人员与设备之间的顺畅交互,提高操作效率。
晶舟转换器是半导体制造的高效助推器,极大地加速了生产进程。它的快速转移能力使晶圆在不同晶舟间迅速流转,减少了工序等待时间。先进的机械结构和驱动系统协同工作,让机械臂的动作敏捷且精 zhun ,高效完成晶圆转移任务。此外,晶舟转换器具备良好的集成性,可与上下游生产设备无缝对接。它能自动接收和输送晶圆,实现生产流程的自动化连贯运行,避免了人工转运的繁琐与低效。这种高效的衔接方式,使整个半导体制造生产线的运转更加流畅,大幅提高了生产效率,帮助企业在市场竞争中抢占先机。随着半导体技术的不断发展,晶舟转换器的性能和功能也在不断提升。
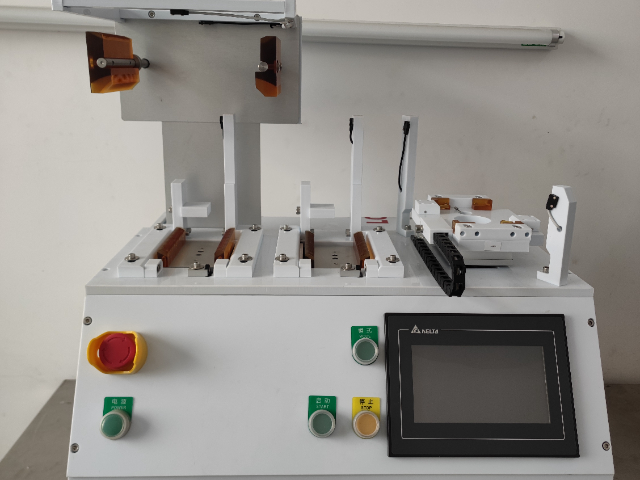
在半导体和光伏产业的生产流程中,晶舟转换器扮演着至关重要的角色。我们的晶舟转换器,以其广泛的应用范围和独特的优势,成为众多企业的shou xuan 。无论是半导体制造中的6英寸或8英寸晶圆晶舟,还是光伏产业里不同规格的硅片晶舟,我们的转换器都能轻松适配。其高度的兼容性,使得您无需为不同的晶舟类型和尺寸而烦恼,一台设备即可满足多种生产需求。我们的晶舟转换器采用双轨道传输设计,两条轨道 du li 运行,互不干涉, da da 提高了生产效率。同时,它还具备碎片检测、几何尺寸检测等可选功能,能够及时发现晶圆和硅片的质量问题,为您的生产过程提供 quan mian的质量保障。在操作方面,我们的晶舟转换器采用PLC控制,取片和插片过程全自动,通过触摸屏菜单操作,简洁明了,即使是新手也能快速上手。此外,它还可选支持MES接口和远程诊断功能,方便您对设备进行远程监控和管理,提高生产的灵活性和便捷性。选择我们的晶舟转换器,就是选择高效、便捷和可靠,让您的生产过程更加顺畅,为您的企业创造更大的价值。转换器内置智能芯片,能够自动识别并匹配连接设备的型号和规格。福建凡华晶舟转换器价格
晶舟转换器支持多种电源接口转换,满足不同国家和地区的使用需求。天津晶舟转换器价格
晶舟转换器工作流程:
一、晶舟识别与定位:当晶舟进入晶舟转换器的工作区域时,设备首先通过安装在特定位置的传感器对晶舟进行识别。控制系统根据传感器反馈的信息,计算出晶舟的精确位置,并控制机械手臂移动到相应位置进行抓取准备。二、晶舟抓取:机械手臂按照控制系统的指令,精确地移动到晶舟上方,抓取机构启动,通过特定的方式与晶舟进行连接。在抓取过程中,抓取机构会实时监测抓取力的大小,确保抓取的稳定性。一旦抓取成功,机械手臂会缓慢提升晶舟,同时再次检查晶舟的状态,确保其在搬运过程中的安全性。
三、晶舟转移:机械手臂在动力驱动系统的带动下,沿着导轨快速移动到目标设备的接口位置。在移动过程中,控制系统会对机械手臂的运动轨迹进行实时监控和调整,确保晶舟在转移过程中不会发生碰撞或晃动。当机械手臂到达目标位置后,会进行精确的定位,使晶舟与目标设备的接口完美对接。
四、晶舟放置:在确认晶舟与目标设备接口对准无误后,抓取机构松开晶舟,将其平稳地放置在目标设备上。然后,机械手臂撤离,完成一次晶舟转换操作。整个过程在控制系统的精确控制下,高效、准确地完成,确保了半导体制造过程中晶舟流转的顺畅性。 天津晶舟转换器价格