商机详情 -
康茂盛气缸协议
气动元件中的无杆气缸应用很广无杆气缸的结构特点与应用场景无杆气缸通过活塞与滑块的磁耦合或机械连接实现直线运动,取消了传统活塞杆,因此具有结构紧凑、行程长的优势。磁耦合无杆气缸利用强磁力传递动力,运动平稳但负载能力有限;机械接触式无杆气缸则通过导轨滑块传递力,负载更大但存在一定摩擦损耗。在自动化焊接流水线中,无杆气缸可带动焊枪完成长距离连续作业;在包装机械的薄膜牵引机构中,其无突出部件的设计能有效避免物料缠绕。高效能气缸大幅提升机械作业效率。康茂盛气缸协议
恒立双作用气缸的双向控制优势双作用气缸通过两端**供气实现双向精确控制,广泛应用于自动化生产线的装配环节。例如,汽车发动机缸体装配中,双作用气缸驱动的机械臂可完成活塞压装、螺栓紧固等多工序协同作业,其重复定位精度可达 ±0.1mm。此类气缸通常配备可调缓冲装置,如 FESTO 的 DSNU 系列通过气压缓冲技术将冲击能量降低 60%,有效延长设备寿命。在高速往复工况下,双作用气缸的响应速度可达 5ms 以内,远超电动执行器的平均水平。江西气缸推力计算它在小型设备和精密仪器中展现出优异的性能。

普通气动元件气缸在食品包装灌装机阀门控制食品级Φ32mm气缸(FDA认证)启闭灌装头,无油润滑避免污染。响应时间0.1s,精度±0.5ml,适用于酱油、饮料等液体定量灌装。薄膜包装热封Φ25mm薄型气缸驱动加热棒下压,行程50mm,压力可调(50-300N)。耐150℃高温密封件确保连续工作,每日完成10万袋封装。箱体码垛定位四组Φ63mm气缸组成定位挡块,行程100mm,同步误差<0.2mm。将纸箱精细推入托盘格位,抗冲击端盖减少频繁启停损伤。
气缸在机器人末端执行器中的应用机器人末端执行器(如抓手)多采用气缸作为驱动元件,凭借快速响应和大推力实现工件的抓取与释放。平***爪通过两个活塞的同步运动实现夹取动作,适合抓取规则形状工件;摆动气爪则通过两个手指的相对摆动完成抓取,适应不规则物体。在物流分拣机器人中,气缸驱动的抓手可在 0.2 秒内完成一次开合动作,分拣效率达每小时 800 件以上。为保护易碎工件,部分抓手配备力传感器,通过调节气缸压力实现柔性抓取。与其他气动元件兼容性好,便于组成复杂的气动系统。
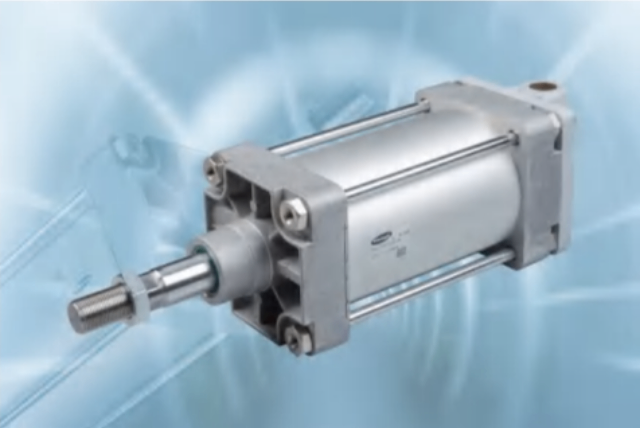
气缸是气动系统中将压缩空气能量转化为机械直线或摆动运动的**执行元件,其类型繁多,通常可按结构形式、功能用途、安装方式、运动轨迹等维度分类。以下是常见类型及特点:一、按结构形式分类(****分类方式)1.活塞式气缸(应用*****)以活塞为**做功部件,通过气压推动活塞沿缸筒运动,分单作用和双作用两种:单作用气缸:*一端有进气口,压缩空气推动活塞向一个方向运动(伸或缩),回程依赖弹簧、重力或外部负载复位。特点:结构简单、成本低、耗气量小,但行程受弹簧限制(通常≤100mm),推力随行程增加而减小(弹簧反力增大)。应用:短行程复位场景(如小型夹紧装置、阀门开关、物料推送)。双作用气缸:缸筒两端均有进气口,压缩空气交替进入两端,推动活塞双向运动(伸/缩均由气压驱动)。特点:行程不受限制(可达数米),推力稳定(无弹簧反力),输出力大,应用*****。应用:自动化生产线的物料搬运、机床上下料、包装机械的推袋/封合等。具有良好的抗侧向力能力,保证运行平稳。DPSR 圆形气缸
气缸快速响应,提升工业自动化水平。康茂盛气缸协议
自动化行业中的气缸的能效优化方法与节能措施提升气缸的能效可从气源处理、运行控制等方面入手。采用变频空压机提供匹配的气源压力,避免压力过高造成的能量浪费;安装节能阀在气缸停止运动时切断气源,减少无功能耗;选用低摩擦气缸,降低运动过程中的能量损失。在间歇工作的生产线中,通过程序控制气缸的待机状态,可节省 30% 以上的压缩空气消耗。此外,定期清理过滤器和干燥器,保证气源洁净度,也能减少因气路阻力增加导致的能耗上升。康茂盛气缸协议