商机详情 -
吉林高速无人船艇加装
现代无人船艇的**竞争力在于其先进的智能算法系统。通过深度学习框架训练的神经网络可以处理复杂的海洋环境数据,实现实时决策优化。在路径规划方面,改进型A*算法结合动态窗口法,使船艇能在复杂航道中计算出兼顾安全性和效率的比较好航线。环境感知系统采用多传感器数据融合技术,将激光雷达、可见光摄像头和红外传感器的信息进行加权处理,明显提升目标识别准确率。部分新型号还引入了数字孪生技术,在虚拟环境中预演任务流程,提前发现潜在风险。这些智能系统的持续迭代,使无人船艇的自主决策能力逐步接近人类水平。无人船艇应用于水下考古,可对沉船遗址进行非接触式扫描和影像记录。吉林高速无人船艇加装
无人船艇
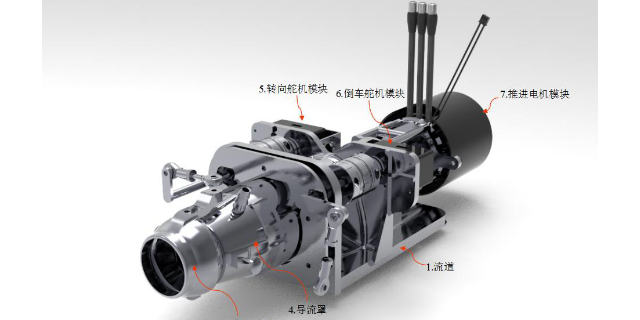
在复杂水域的环境监测任务中,无人船艇需要强大且灵活的动力系统,东莞小豚智能的喷水推进器便是理想选择。当无人船艇驶入水流湍急的河道时,传统推进方式可能难以精细控制船艇姿态,导致监测数据出现偏差。而搭载小豚智能喷水推进器的无人船艇,凭借其可快速调节喷口方向和力度的特性,能够在激流中保持稳定航行,确保水质采样设备、传感器等精细获取数据。即使遇到漂浮杂物缠绕,喷水推进器特殊的防堵塞设计和智能检测系统,也能及时调整运行参数,避免设备损坏,保障环境监测任务的顺利完成。吉林高速无人船艇加装小豚智能自主研制的“智能船舶辅助驾驶系统CYBERPILOT”能为船舶提供一个智能化的船舶交互和驾驶平台。
未来无人船艇将向集群协作、跨域协同及绿色化方向演进。集群技术通过多艇组网实现任务分配与协同作业,例如在海洋科考中,可由母船释放数十艘微型无人艇组成探测阵列,大幅提升数据覆盖范围。跨域协同指无人船艇与无人机、水下机器人联动,构建“空-水-岸”一体化监测网络,适用于边境巡逻或生态调查。绿色化设计则聚焦低功耗与环保材料,如采用氢燃料电池或生物降解复合材料。同时,边缘计算技术的应用将使部分数据处理任务前置到船载终端,减少对云端依赖。随着人工智能与物联网技术的渗透,无人船艇的功能边界将持续扩展,成为智慧水域管理的关键节点。
无人船艇正成为现代智慧港口建设的重要组成部分。在港口水域,无人船艇可执行航道巡查、浮标维护、船舶引导等任务,大幅提升港口运营效率。小豚智能研发的港口作业无人艇搭载多光谱识别系统,能够24小时监测港区水域状况,及时发现油污泄漏、非法入侵等安全隐患。与传统工作船相比,无人艇作业更精细、响应更快速,且能避免人员在危险区域作业的风险。目前,这类技术已在多个沿海港口试点应用,为港口数字化转型提供了新的技术路径,展现了智能航运装备的广阔应用前景。无人船艇的模块化设计,使其易于维护和升级。
无人船艇的一大突出特点是操作便捷。操作人员只需在岸基控制中心,通过专门设计的操控软件,就能轻松完成对无人船艇的各项指令下达。软件界面设计简洁直观,即使是初次接触的人员,经过简单培训也能快速上手。借助先进的远程通信技术,操作人员可以实时监控无人船艇的位置、速度、航向等关键信息,如同身临其境。在执行任务过程中,若需要调整任务路线或改变监测参数,只需在控制软件上进行简单设置,无人船艇便能迅速响应。这种便捷的操作方式,不*节省了人力成本,还提高了工作效率,让复杂的水域作业变得更加轻松高效。小豚智能致力于研发无人船平台。吉林高速无人船艇加装
小豚船舶智能化改造传统有人驾驶开发升级改造成无人船。吉林高速无人船艇加装
随着无人船艇市场的快速发展,东莞小豚智能技术有限公司积极参与行业标准的制定。凭借在无人船艇研发和生产方面的丰富经验,公司与行业内其他企业、科研机构共同探讨,为无人船艇的技术规范、安全标准、质量检测等方面提供建议。通过推动行业标准的制定,有助于规范市场秩序,提高整个行业的产品质量和服务水平。小豚智能的无人船艇在技术和质量上的优势,也将成为行业标准制定的重要参考,带领无人船艇行业朝着更加健康、有序的方向发展。吉林高速无人船艇加装