商机详情 -
宁波防爆AGV对比
港口码头作为全球贸易的重要枢纽,正大力引入AGV实现货物运输的自动化。在集装箱码头,AGV负责将岸边起重机吊运下来的集装箱搬运到堆场指定位置,或者将堆场的集装箱运送到岸边等待装船。AGV可以在复杂的港口环境中自主导航,适应不同的路面状况和天气条件。其强大的负载能力能够搬运重达数十吨的集装箱,并且运输速度快、定位精细。与传统的集卡运输相比,AGV无需人工驾驶,减少了人力成本和人为操作失误,提高了港口作业的安全性和效率。同时,多个AGV可以协同工作,形成高效的集装箱搬运系统,缩短了船舶在港停留时间,提升了港口的整体运营能力和竞争力。AGV在汽车制造业中提高了装配效率。宁波防爆AGV对比
家具制造行业面临着产品种类繁多、生产工艺复杂等挑战,AGV的灵活应用为其提供了有力支持。在家具生产车间,AGV可以搬运木材、板材、五金配件等原材料以及半成品家具部件。它能够根据不同的生产订单和工艺流程,灵活调整运输路线和配送目的地。例如,在板式家具生产线上,AGV将开好料的板材运送到封边、钻孔等加工工位,然后将加工好的部件运送到组装区域。AGV的应用提高了家具生产过程中的物料配送效率,减少了生产线上的等待时间,提高了生产产能。而且,AGV可以与智能仓储系统相结合,实现原材料和成品家具的自动化存储和管理,提升了家具制造企业的整体运营管理水平。青浦区智能AGV供应商AGV车辆在零售行业中提高了配送效率。
一些专注于AGV导航技术研发的企业也在积极推动AGV导航技术的创新。如苏州坤厚自动化科技有限公司,主要提供移动机器人定位导航模块KH-NaviKit和基于该技术的无人叉车AGV智能物流系统。该公司**开发的基于异构系统架构的机器人核心算法处理器可以提供稳定可靠的定位数据,使之成为AGV理想的定位导航解决方案。综合来看,目前的AGV导航技术复杂多样,不同的场合应选用不同的导航技术,如:在有叉车行驶的场合,不宜选用磁条导航;路径需要经常变换的场合,应考虑激光导航;露天环境,考虑到气候因素,不宜采用激光导航;在环境恶劣的仓库,适宜使用磁钉和RFID导航;在环境比较好的场景,适宜使用二维码导航。
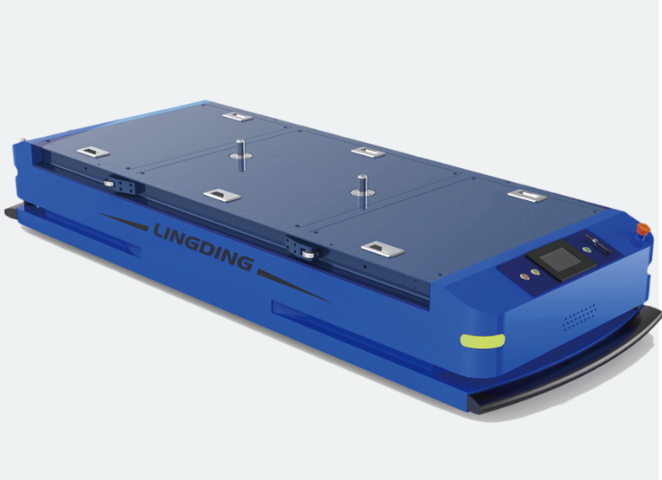
测距导航该导航技术主要应用于激光二位扫描仪对其周围环境进行扫描测量,获取测量数据然后结合导航算法实现AGV导航。该导航传感器通常使用具有安全功能的安全激光扫描仪实现,由于采用安全激光扫描仪可以实现安全功能的同时也能够实现导航测量功能。采用测距导航技术的AGV可以实现进入集装箱内部进行自动取货送货功能。轮廓导航轮廓导航是目前AGV**为先进的导航技术,该技术利用二维激光扫描仪对现场环境进行测量、学习,并绘制导航环境,然后进行多少测量学习,修正地图进而实现轮廓导航功能。利用自然环境(墙壁、柱子以及其它固定物体)进行自由测距导航根据环境测量结果更新位置。轮廓导航优点:不需要反射器或其它人工地标;降低安装成本;减少维护工作;激光导航替代方案AGV系统减少了物流环节的资源浪费。
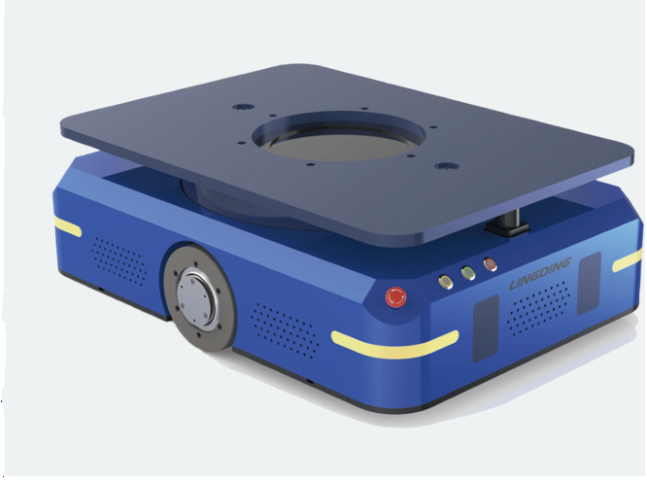
随着智能制造理念的不断深入,AGV智能叉车式的智能化程度也在持续提升。它配备了先进的传感器和智能算法,能够对周围环境进行实时感知和分析。例如,通过视觉传感器,它可以识别货物的形状、尺寸和位置,实现精细的叉取操作;利用激光雷达,它能够绘制出高精度的地图,并实时更新自身位置信息。此外,AGV智能叉车式还具备自主学习能力,能够根据以往的工作经验和数据反馈,不断优化自己的运行路径和作业策略。这种智能化的发展趋势使得AGV智能叉车式能够更好地适应复杂多变的工业生产和物流场景,为企业创造更大的价值。AGV车辆在化工行业中安全运输危险品。金山区智能AGV商家
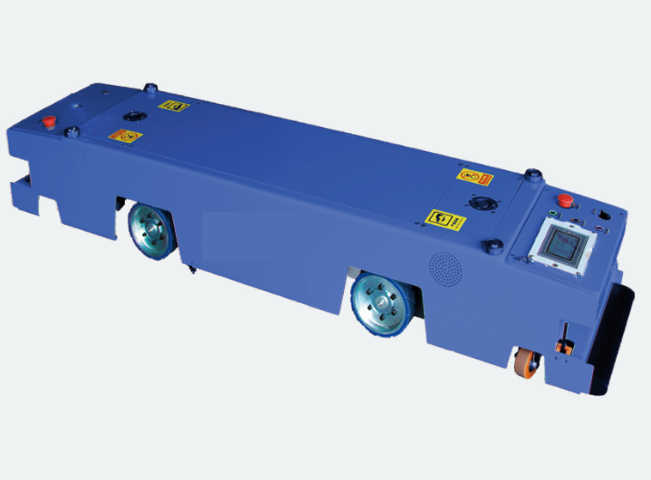
AGV小车能够自动避障,确保安全运行。宁波防爆AGV对比
路径规划是导航的一个重要环节。AGV根据环境的变化,对环境信息进行收集和分析,按照某一性能进行搜索,进而找出从起点到目标点的比较好无碰撞路径或次优无碰撞路径;能够处理环境模型中的不确定因素和路径跟踪中出现的误差,使外界对机器人的影响降到**小;利用已知信息来引导AGV动作,从而得到相对更优的行为策略。根据AGV掌握环境信息的程度不同,可分为两种类型:一个是基于环境信息已知的全局路径规划,另一个是基于传感器信息的局部路径规划,后者环境是未知或部分未知的,即障碍物的尺寸、形状和位置等信息必须通过传感器获取。宁波防爆AGV对比