商机详情 -
S和M快速对中校正仪维修
看得见的精确!快速对中校正仪:偏差实时显,调完直接投产在工业设备运维中,“对中是否精确”“调整是否到位”“能否快速恢复生产”是运维人员****的诉求。快速对中校正仪凭借“偏差实时可视化”与“校准即投产”的**优势,打破传统对中作业“盲调、反复校验、投产延迟”的痛点,让对中过程从“依赖经验判断”转变为“数据实时可控”,具体价值与实现逻辑如下:一、“看得见的精确”:实时可视化,偏差无隐藏快速对中校正仪的“精确可见”,并非简单的数值显示,而是通过多维度、动态化的可视化设计,让运维人员直观掌握轴系偏差的“位置、大小、调整方向”,彻底消除传统方法的“信息差”:1.动态图形化展示:偏差直观可感传统对中(如百分表法)需人工记录不同角度的读数,再通过公式换算偏差,过程抽象且易出错;而快速对中校正仪通过高清屏幕实时输出图形化偏差界面。 别让 “不对中” 拖垮设备!快速对中校正仪。S和M快速对中校正仪维修
测量范围和量程:根据实际应用中涉及的机械尺寸和距离,选择测量范围和量程合适的校正仪。一般来说,至少应具有60英尺(约18米)的距离测量范围,以便处理诸如冷却塔风扇和深潜水泵之类的应用。故障诊断与分析功能:一些**的快速对中校正仪具备振动分析、红外热成像等功能,可同步采集多维度数据,自动判断故障根源并提供维修建议,方便用户对设备进行***的状态监测和故障诊断。报告和文档功能:具备生成综合PDF报告功能的校正仪更便于记录和分享校准数据,报告中应包含测量数据、图像等信息,有些校正仪还支持电子版签署报告,方便存档和追溯。品牌与售后支持:**品牌的校正仪通常在质量、技术支持和售后服务方面更有保障。要考虑供应商提供的培训资源、现场支持以及配件供应的便捷性等,确保在使用过程中遇到问题能及时得到解决。预算:根据企业的实际预算情况进行选择,不是价格越高越好,应结合使用频率、设备重要性等因素综合评估。如果对精度要求不高且预算有限,也可以考虑一些国产品牌-HOJOLO。 振动快速对中校正仪校准规范快速对中校正仪偏差实时显示的原理是什么?
计算机:通过USB数据线等连接方式,可将快速对中校正仪与计算机连接,把校准数据传输到计算机上进行存储。如汉吉龙ASHOOTER-AS500激光对中仪,可通过USB输出数据,在PC端进行数据处理与报告定制,方便存档与追溯。云端平台:一些先进的快速对中校正仪支持将数据上传至云端平台。通过云端存储和管理,用户可以在不同的地点、不同的设备**问和查看校准数据,实现数据的共享和协同管理。校正仪内置存储器:大多数快速对中校正仪都具备内置存储器,可直接将校准数据存储在仪器内部。
HOJOLO快速对中校正仪采样数据与偏差的关联仪器通过旋转两轴(通常旋转360°),采集不同角度下(如0°、90°、180°、270°)的径向位移数据,假设采集到主动轴与从动轴在“联轴器近端”(靠近联轴器的支撑点)和“联轴器远端”(远离联轴器的支撑点)的位移差,通过以下公式计算偏差:角度偏差计算:α=arctan[(δ远-δ近)/L]×(180/π),其中L为两支撑点之间的距离(轴长);平行偏差计算:δ=(δ远+δ近)/2(取近端与远端偏差的平均值,反映整体平行偏移)。3.调整量计算:从偏差到可操作值以“电机(主动轴)与泵(从动轴)对中”为例,电机通过前脚和后脚固定在底座上,算法根据偏差值计算前脚和后脚的调整量:若存在角度偏差α,则前脚调整量=α×L前/(180/π),后脚调整量=α×L后/(180/π)(L前为前脚到联轴器的距离,L后为后脚到联轴器的距离);若存在平行偏差δ,则前脚与后脚调整量相同=δ(需同时升高/降低前脚和后脚,确保两轴平行)。上述公式均由仪器内置算法自动执行,运维人员无需手动计算,*需根据仪器输出的“前脚调整XXmm、后脚调整XXmm”直接操作,这也是其“降低技能要求”的**逻辑之一。快速对中校正仪校准数据的追溯管理如何实现?

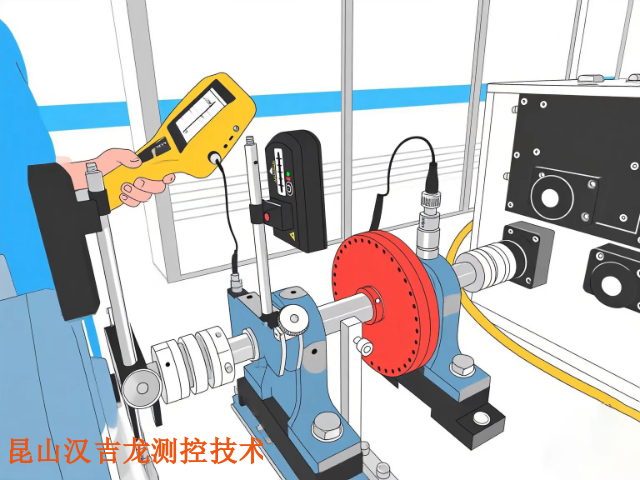
快速对中校正仪通过多种方式降低了运维人员的技能要求,具体如下:操作界面直观简洁:许多快速对中校正仪配备了图形化的操作界面和触摸屏,以直观的方式显示测量数据和操作指引。例如AS轴对中校准测量仪,其,以绿、黄、红三色直观标记轴同心度偏差范围,操作人员无需复杂培训,即可清晰掌握设备状态。自动化测量与计算:快速对中校正仪采用先进的传感器技术和自动化算法,能够自动进行测量和数据处理,无需运维人员具备深厚的专业知识和复杂的计算能力。如激光对中校正仪,可通过发射激光束并接收反射信号,精确测量两轴之间的偏差,自动计算出所需的调整量,运维人员只需根据仪器提供的结果进行相应的调整操作即可。 快速对中校正仪的传感器精度有多高?振动快速对中校正仪校准规范
快速对中校正仪:适配流水线设备,对中校准不影响生产。S和M快速对中校正仪维修
汉吉龙 -快速对中校正仪实现“偏差实时显示”的**,是通过高精度传感器采集轴系空间位置数据,经**算法实时运算处理,再将结果以可视化形式输出,本质是“数据采集→信号处理→运算分析→可视化呈现”的闭环实时响应过程。其具体原理可拆解为以下4个关键环节:一、第一步:高精度传感器实时采集轴系位置数据对中校正的**是测量“主动轴(如电机轴)与从动轴(如泵轴、齿轮箱轴)”的径向偏差(两轴中心的平行偏移量)和角度偏差(两轴轴线的倾斜角度),这一步依赖两类**传感器实现数据“实时捕捉”:S和M快速对中校正仪维修