商机详情 -
南平船用配电解决方案
航行信号灯控制箱的电源参数:
输入电压:常见的有交流输入如 AC220V 等,以及直流输入如 DC12V、DC24V 等,不同的船舶类型和应用场景可能会选择不同的输入电压。电压波动范围:例如在额定输入电压的 ±10% 或其他规定范围内,控制箱应能正常工作,以保证在船舶电网电压存在一定波动的情况下,航行信号灯依然可以稳定运行。电源频率:对于交流电源输入的控制箱,其电源频率一般为 50Hz 或 60Hz,需确保在该频率下控制箱的性能稳定。
通信参数:通信接口:常见的有 RS485、RS232、CAN 等通信接口,以便与船舶的其他控制系统或监控设备进行数据通信,实现对航行信号灯状态的远程监控和管理。通信协议:如 Modbus RTU、CANopen 等,不同的通信协议具有不同的特点和应用场景,需要根据实际需求进行选择。
负载参数:负载功率:根据所控制的航行信号灯的功率需求,控制箱应具备相应的负载能力。例如,能够支持每路信号灯的功率为 5W 至 100W 或更高的功率范围1。短路保护和过载保护:当信号灯线路发生短路或过载故障时,控制箱应能及时检测到并采取保护措施,如切断故障线路,以防止对控制箱和信号灯造成损坏。保护动作的电流阈值和时间延迟等参数需要根据具体的设计要求进行设定。 船用配电设备服务,就选无锡宏智铭科技,让您满意,期待您的光临!南平船用配电解决方案

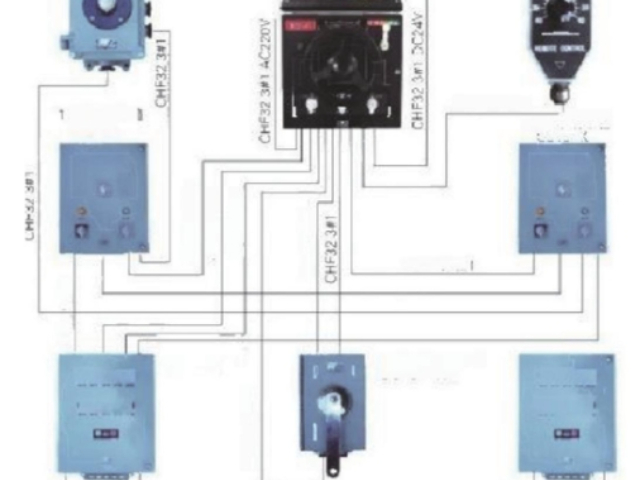
船用组合起动器的选型要点:
电动机参数匹配
根据船舶上所控制电动机的类型(如三相异步电动机)、额定功率、额定电流、额定电压、启动方式(如直接启动、星 - 三角启动等)等参数来选择合适的组合起动器。确保起动器的额定电流和额定电压能够满足电动机的启动和运行要求,并且其控制和保护功能能够与电动机的特性相匹配。
防护等级选择
根据组合起动器在船舶上的安装位置来选择合适的防护等级。如果安装在机舱等环境恶劣的地方,应选择防护等级较高(如 IP54 或更高)的起动器;如果安装在船舶的控制室内等环境较好的地方,可以选择相对较低防护等级的起动器,但也要考虑到防止意外进水和灰尘侵入等因素。
船级社认证
确认所选的船用组合起动器具有相应船级社的认证。不同船级社的认证标准在一些细节上可能存在差异,船舶所属船级社的要求必须得到满足,以确保船舶的安全性和合规性。 长沙船用配电产品无锡宏智铭科技为您提供船用配电设备服务,欢迎您的来电!
航行信号灯控制箱组成结构:
控制面板
这是船员操作的主要界面,上面有各个航行信号灯的控制按钮或开关,按钮上通常标有相应信号灯的名称或功能符号。此外,控制面板上还可能有亮度调节旋钮,用于调整信号灯的亮度,以适应不同的环境光条件。
继电器和接触器
这些电器元件用于实现对航行信号灯的电路控制。继电器能够通过小电流控制大电流电路,当控制面板上的按钮被按下时,继电器会动作,使相应信号灯的电路接通或断开。接触器则主要用于控制大功率的信号灯,保证电路的可靠通断。电源模块为航行信号灯提供稳定的电源。船舶上的电源系统比较复杂,可能有不同的电压等级,
电源模块
可以将船舶的主电源转换为适合航行信号灯使用的电压。例如,将 380V 或 440V 的船舶主电源转换为 24V 或 12V 的直流电源,为信号灯灯泡提供稳定的供电,防止电压波动对灯泡寿命和信号显示效果的影响。
保护装置
包括熔断器、断路器等。熔断器在电路发生过载或短路时,会因电流过大而熔断,从而切断电路,保护设备和线路免受损坏。断路器则可以手动或自动切断电路,当出现故障电流时,它能够快速跳闸,并且可以通过复位操作重新接通电路,在故障排除后方便船员恢复信号灯的正常工作。
自动操舵仪的缺点:
依赖电子设备和电力
电子设备故障风险:自动操舵仪高度依赖电子元件和复杂的电子系统。在海洋环境中,电子设备容易受到潮湿、盐雾、电磁干扰等因素的影响,导致设备故障。一旦电子元件出现故障,可能会影响自动操舵仪的正常工作,进而影响船舶的航行安全。电力供应要求高:其正常运行需要稳定的电力供应。如果船舶的电力系统出现故障,如发电机故障或供电线路损坏,自动操舵仪可能无法工作。
初始成本和维护成本高
购买成本高:自动操舵仪是一种较为复杂的船舶设备,其研发、生产涉及到高精度的电子技术和复杂的机械结构,导致其购买成本较高。维护成本高:其维护需要专业的技术人员和专门的测试设备。电子元件的维修和更换往往需要较高的费用,而且定期的校准和检测也增加了维护成本。
可能存在操作复杂性
船员培训要求高:船员需要经过专门的培训才能熟练操作自动操舵仪。不同的操作模式和功能设置需要船员掌握一定的电子技术和操作规范,应急处理复杂:在自动操舵仪出现故障或异常情况时,需要船员快速切换到其他操舵模式(如手动操舵)进行应急处理。 无锡宏智铭科技为您提供品质的船用配电设备服务。
船用配电系统常见的接地故障问题
原因:绝缘损坏是接地故障的主要原因。当电气设备或电缆的绝缘层被破坏后,带电部分可能与船体(接地部分)接触,从而产生接地故障。这种绝缘损坏可能是由于设备老化、受潮、机械损伤等因素引起的。设备安装不符合要求也可能导致接地故障。例如,电气设备的接地连接不牢固或者没有正确接地,在设备运行过程中,一旦出现漏电情况,就无法将电流有效地引入大地,从而引发接地故障。后果:接地故障会使船体带电,对船员的人身安全构成威胁。同时,接地故障可能会引发漏电保护装置动作,导致部分设备停电,影响船舶的正常运行。如果接地故障没有及时发现和处理,还可能引发电气火灾等更严重的事故。 无锡宏智铭科技致力于提供船用配电设备,有需要可以联系我司哦!长沙船用配电产品
无锡宏智铭科技致力于提供船用配电设备服务,有想法的不要错过哦!南平船用配电解决方案
自动操舵仪的重要操作原理是基于反馈控制理论。其主要目的是通过不断监测船舶的实际航向,并与设定的目标航向进行比较,然后根据偏差来调整舵角,使船舶保持在预定航向上。
主要组成部分及其原理
传感器
电罗经和磁罗经:电罗经和磁罗经用于测量船舶的实际航向。电罗经通过测量地球自转角速度和重力加速度来确定船舶的真方位,精度较高;磁罗经则是利用地球磁场来指示方向。这些罗经所测得的航向数据会被传送给自动操舵仪的控制单元。GPS(全球定位系统):GPS用于确定船舶的地理位置。通过连续获取船舶的位置信息,自动操舵仪可以计算出船舶的实际航向,并与目标航向进行对比。GPS信号提供了较为精确的位置和速度信息,有助于提高自动操舵的精度。
控制单元:信号处理与比较、舵角计算
执行机构
舵机系统:计算得出的舵角指令会被传送给舵机系统。舵机系统根据指令驱动舵叶转动相应的角度。例如,如果船舶的实际航向偏左,控制单元计算出需要向右转动一定角度的舵角,舵机系统就会将舵叶向右转动,使船舶向右转向,从而纠正航向偏差。 南平船用配电解决方案