商机详情 -
辽宁上下料达明机器人制作
TM智慧型协作机器人拥有协作型机器人操作简单、快速部署、灵活运用的特点外,还创新的将视觉辨识结合在机器人上,让机器人有了眼睛。在使用视觉功能时更简易直觉,内建的视觉辨识免除了以往更换机器人时的重复校正,可以实现快速复制部署的任务。内建视觉将TM机器人的功能从物品取放、坐标、定位等基础应用,延伸到瑕疵检测、条码扫描、产品功能测试等应用中。“手”“眼”并用的TMRobot将大幅提升您的自动化产线的附加价值和生产效率。达明机器人,就选达明机器人(上海)有限公司,让您满意,期待您的光临!辽宁上下料达明机器人制作

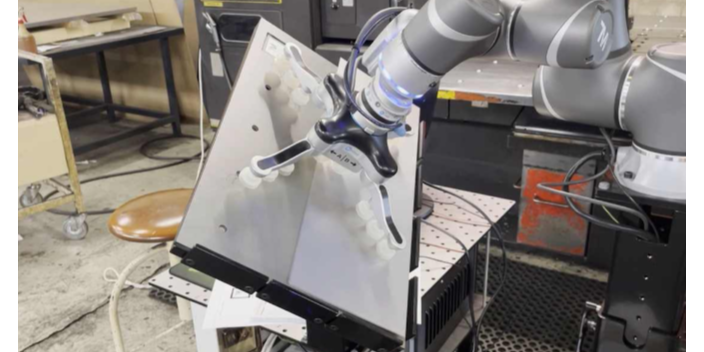
众所周知,钢板有磁性,一般采用磁性分张器来进行板料分张,通过磁性分张器的强磁来磁化板料,板料磁化后相邻板料的磁性极性相同,利用同性相斥的原理分开相邻的板料。但是铝钣金没有磁性,不能被磁化,因此磁性分张器不能分开铝钣金板料。数控机床上下料。为了确保每次只抓取一张板材,达明机器人内建视觉,整合即插即用配件,精细定位拿起板材,测量板材的重量,检查是否有双层板材。并通过的landmark技术保证上下料位置在不固定、偏移或倾斜时,也能进行位置补偿,确保钣金每次都能正确定位。并使用三个传感器将钣金准确定位在夹具和X量规块上。这一过程有助于确保准确性和一致的结果,并能尽量减少制造过程中的错误。提高了工作的广度和宽度,提高了劳动效率。广州餐饮零售达明机器人达明机器人(上海)有限公司为您提供达明机器人。

取放料应用(Pick&Place)▪使用TMLandmark,弹性布置手臂与周边位置▪2DVision,高定位精度,重复误差±▪3DVision,支持散乱堆栈取料应用、非平面物体定位▪无需围栏。自主移动机器人AMR▪使用TMLandmark,智能补偿自走车辆到定位的重复误差▪M系列,DC电源输入,易于AMR整合。智慧堆栈(SmartPalletizing)▪使用TMLandmark,加速定位来料位置▪2DVision,来料不固定与分类▪支持同时2种箱堆栈,换栈,解栈▪整合立柱控制比较高可以堆到。焊接应用(Welding)▪TMflow用户接口让焊接教导更简单▪简单操作,手拉直接教导,程序自动生成路径,数分钟内即可开始焊接作业▪焊接的参数设定页面,包含电压/电流/速度/摆弧等常用功能▪拥有焊机设定接口,可快速设定手臂与焊机间的通讯控制,支持市面上常用焊机。
随着视觉系统在自动化领域中日益重要,除了让机器设备能正确撷取物体的影像外,如何进一步对该影像做辨识、辨别更决定了视觉系统带来效益的上限。将AI人工智能引入与视觉系统做结合,以自带视觉功能的TMRobot为例,将大幅提高视觉系统带来的效益与应用领域。如工厂中的质量检测关卡,便可透过整合AI功能,让达明协作手臂自行侦测产品不符合质量规范的项目,如外观瑕疵、缺件、部件错误等等,减少人为检测疏失外,还能保留完整的产品检验履历。达明机器人提供TMAI+人工智能解决方案,让使用者可以自行训练人工智能模型,并将模型应用在达明协作型手臂上,让手臂运用人工智能进行更高阶、复杂的视觉任务。达明机器人(上海)有限公司致力于提供达明机器人,有想法的可以来电!
移动复合机器人是智能工厂建设的关键一环,了协作机器人和AGV/AMR两者特性的达明移动复合机器人更具柔性化。作为全球协作型机器人和智能视觉系统先驱,达明机器人致力于研发和应用自动化科技,以创新的自带智能视觉结合手臂,加上AI+人工智能系统,手眼脑合一,提升机器人能力、弹性与易用度,协助企业大幅降低导入自动化人力与时间成本。针对AGV/AMR搭配的复合机器人应用场景,达明机器人特推出直流电源版本的手臂(M系列),透过TM特有的Landmark及TMvision视觉系统建立动态相对坐标体系并实现跨手臂点位共享,弥补AMR行走的运动偏差并精细定位、平稳取放,非常适用于医疗及半导体行业移动搬运、智能巡检、移动式堆栈、加工机床上下料等要求机动性高、精度高的应用。达明机器人(上海)有限公司是一家专业提供达明机器人的公司。辽宁上下料达明机器人制作
达明机器人(上海)有限公司是一家专业提供达明机器人的公司,有想法的不要错过哦!辽宁上下料达明机器人制作
TM16专为更高的负载需求所设计,适用于机加工上下料的搬运、物流搬运和包装等应用。此机型能搬运更重的材料与大型产品,有效帮助您提高生产率。TM16有精细位置重现能力与达明机器人的视觉系统,使得我们的协作机器人可以非常准确地执行任务。TM16常用于汽车业、机械加工和物流产业。可达范围:900mm负载能力:16kg重量:32kgTM20是达明机器人AICobot系列中高负载的手臂。它能够负重高达20公斤,轻松满足更大、更重的应用,进一步扩展机器人自动化的范畴。专为大量取放、重型机器管理以及大容量的包装和堆栈所设计。TM20适用于多种应用并能适用在大部分的产业。可达范围:1300mm负载能力:20kg重量:。辽宁上下料达明机器人制作