商机详情 -
蚌埠ABB6700机器人
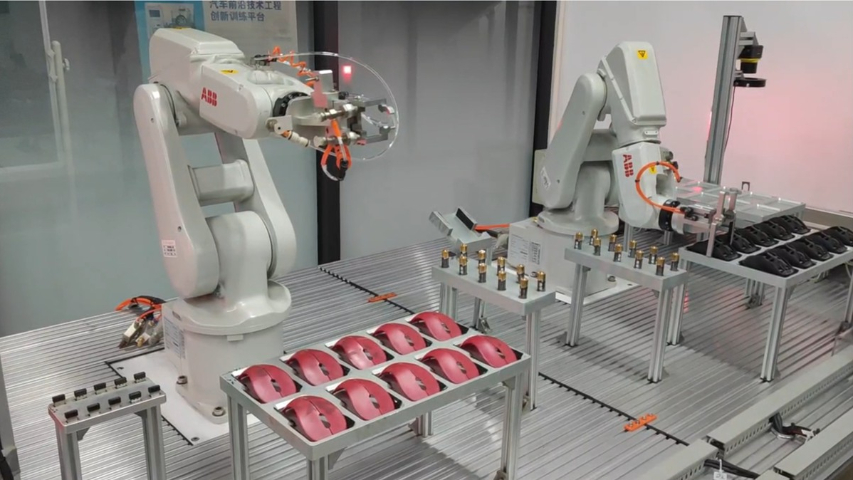
项目背景与目标背景:杭州某**积极投身于智能制造教育的前沿探索,精心开展双机协作鼠标组装工作站调试项目。在智能制造浪潮席卷全球的当下,传统制造业向智能化转型的需求日益迫切,社会对掌握**自动化技术的人才求贤若渴。目标:敏锐洞察这一趋势,旨在通过此项目,为学生打造一个集高度仿真性与深度挑战性于一体的实训平台,助力学生在实践操作中深度洞悉自动化生产线的运作机理,熟练掌握多机器人协同作业的关键技术。系统构成机器人重点:项目选用两台型号为120*2的高性能机器人作为主力设备。这两款机器人凭借其出色的机械设计与精密的电子控制系统,展现出非凡的运动性能。其重复定位精度可达±,能够如绣花针般精确地抓取和安置各类鼠标零部件,为组装流程的精确度筑牢根基。灵活多变的关节设计,赋予机器人在狭小局促空间内自由穿梭、灵活作业的能力,轻松驾驭复杂的组装动作。1kg的负载能力,足以承载鼠标组装环节涉及的各类零部件重量,确保运行稳定。定制实训台:专门定制了契合项目需求的实训台。该实训台在设计上深度融合人机工程学原理,经精确测算的高度,充分考虑学生操作时的舒适度,长时间作业也不易产生疲劳感。同时,配备**的光幕传感器。定期检查机械臂的控制柜散热系统,防止因过热损坏电子元件,浙江展杭维护检修,保障控制柜稳定。蚌埠ABB6700机器人
工业机器人在汽车制造中扮演 角色,广泛应用于焊接、冲压、喷涂和总装环节。以焊接为例,六轴机器人通过高精度伺服系统可实现0.1mm重复定位精度,每分钟完成超过50个焊点,效率是人工的3倍以上。现代车身车间采用多机器人协同作业系统,通过激光视觉引导实现不同型号车身的无缝切换,支持柔性化生产。某全球车企的智能工厂部署了500台焊接机器人,将单车生产周期从30小时压缩至18小时,年产能突破120万辆。此外,机器人搭载力控传感器可动态调整焊接压力,使车身接缝强度提升15%,大幅提升车辆安全性能。宁波市ABB机器人维护专业维保机械臂的视觉系统,可确保图像识别精确,有问题找浙江展杭,调试优化提升性能。
光伏组件的电池片串焊生产线上,工业机器人以微米级精度完成电池片焊接,设备的稳定性直接关系到光伏组件的发电效率和使用寿命。由于光伏行业生产节奏快,设备一旦停机损失巨大。智小杭推出 “极速修复” 售后服务,承诺接到故障报修后,1 小时内提供远程技术指导,若无法解决,工程师 8 小时内到达现场维修。在某光伏企业的生产过程中,串焊机器人的焊接头出现异常,导致焊接不良率大幅上升。智小杭工程师通过远程指导初步判断故障原因后,迅速携带备用焊接头赶赴现场, 用 2 小时就完成了焊接头的更换和调试,使生产线恢复正常。同时,为企业提供设备升级服务,根据光伏技术发展,对机器人焊接工艺、视觉识别系统进行优化,如引入新型的激光焊接技术,提高焊接效率和质量,助力企业提升产品竞争力,降低生产成本。
卫浴陶瓷打磨生产线,机器人在潮湿、酸碱环境下对陶瓷制品进行打磨、修边,机械部件易被腐蚀,电气系统易受潮。某卫浴厂的打磨机器人运行 2 年后,出现打磨刀具磨损过快、控制系统失灵的情况。智小航维护人员更换耐腐蚀的陶瓷刀具,对刀具安装部位进行密封处理,防止酸碱液体侵入。对电气控制柜进行防潮改造,加装除湿装置,定期检测电路板的绝缘性能。使用防腐涂料对机械臂进行表面处理,提高抗腐蚀能力。经过维护,机器人使用寿命从 4 年延长至 7 年,设备稳定性大幅提升。发那科搬运机器人故障诊断,定位问题根源,有问题找浙江展杭,延长设备使用寿命。

ABBFlexPendant示教器采用图形化交互设计,配备8英寸高灵敏度触摸屏,支持多种编程模式:轨迹编程通过可视化界面直接绘制线性/圆弧路径,系统自动生成RAPID代码集成"单步执行"调试功能,可逐指令检查运动轨迹与IO信号状态拖拽示教(Lead-throughTeaching)在力控模式下(<50N启动力),操作人员可直接拖动机器人末端至目标位姿系统以100Hz采样率记录关节角度,自动优化为平滑运动指令快速应用模板预置焊接、码垛等20+行业工艺包,支持参数化快速配置该方案使非专业人员也能在30分钟内完成基础编程,在汽车零部件柔性产线实测显示:新程序平均创建时间从4小时缩短至2小时轨迹修正效率提升80%(传统点动模式需重复定位)特别适合医疗器材、航空航天等领域的小批量(<50件)定制化生产系统符合ISO10218安全标准,所有操作数据实时同步至ABBAbility™云端备份。维保机械臂的力传感器,可确保力反馈准确,浙江展杭校准调试,保障作业安全与质量。金华ABB660机器人维修
检测机械臂的安全光栅,防止因故障失去防护功能,有问题找浙江展杭,恢复光栅正常防护。蚌埠ABB6700机器人
ABBIRB910INV倒装型机器人作为工业机器人精度**,其±定位精度通过三项**技术实现:机械结构优化采用碳纤维增强臂体,热膨胀系数<μm/℃谐波减速器+直驱电机组合,传动背隙<°环境控制系统气浮隔振底座消除地面振动(隔振频率>50Hz)恒温油冷循环系统维持关节温度波动±℃闭环反馈体系激光干涉仪实时校准(采样率1kHz)六维力传感器补偿装配接触力(分辨率)典型应用案例:光刻机透镜组装∎通过纳米级运动轨迹规划,实现透镜组间距误差<10nm∎配合白光干涉仪进行在线检测,良率提升至MEMS传感器封装∎压电陶瓷驱动轴实现μm步进分辨率∎视觉-力觉混合控制完成5μm焊球精细植球该机型在半导体领域实测显示:■晶圆搬运碎片率从■MEMS器件贴装周期缩短40%。蚌埠ABB6700机器人