商机详情 -
湖北协作机器人力控推荐
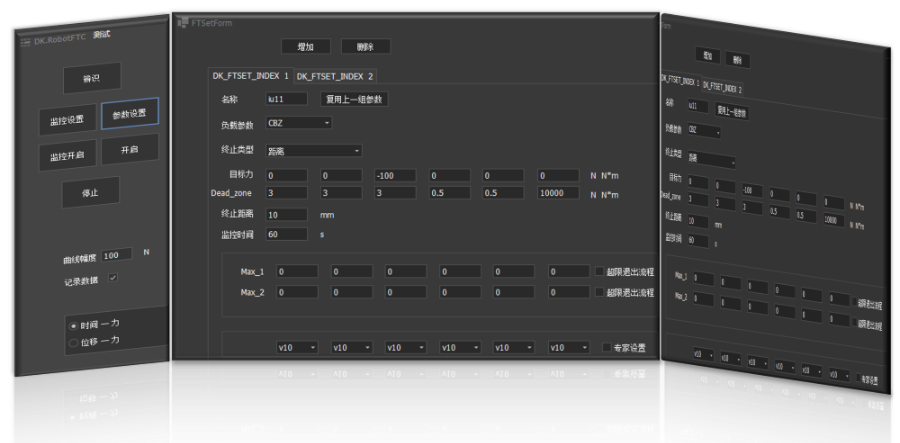
达宽科技的机器人力控软件配备了灵活的超限报警功能,允许用户针对每个监测方向设定两级报警阈值。此外,软件拥有超限自动退出功能。一旦监测到超出设定的安全值,系统不*会发出警报信号,还将自动中断装配流程,确保传感器和工件的安全。该软件提供了一个高度灵活的参数管理系统,内置了多组力控参数和负载辨识参数的保存功能。用户可以为每组参数设定个性化的终止条件,以满足特定应用场景的需求。此外,我们的系统允许多组力控参数调用同一个负载参数设置,简化了配置过程,同时确保了在力控调节过程中对负载特性的一致性理解,无论面对何种工况变化,都能快速适应。机器人力控技术能显著提高自动化生产效率,达宽科技的解决方案帮助用户优化操作精度,节省时间和成本。湖北协作机器人力控推荐
在实际应用中,机器人力控能够自适应地处理不同的负载和不同的工况,机器人力控能够处理不同类型的工件时保持比较好的操作表现。这种适应性使得机器人能够应对多变的生产环境,不再局限于简单的重复性工作,而能处理更加复杂和精细的任务。使用机器人力控系统,还能够有效降低生产过程中的废品率。机器人力控系统能够通过力传感器精细判断所需的施力,避免了因过度或不足施力导致的生产错误,从而降低了资源浪费,提升了生产效率和资源利用率。贵州协作机器人力控方案机器人力控系统通过智能调节力反馈,达宽科技让机器人执行任务时更加高效,减少了时间浪费。
素材六:机器人力控提升多任务处理能力机器人力控技术能够让机器人在执行多个复杂任务时保持高效和精确。传统工业机器人通常只针对单一任务进行优化,而机器人力控通过动态调整机器人的施力和动作,使其能够在不同任务之间灵活转换,无论是精细装配、力道控制还是碰撞避让,机器人都能够根据具体需求自动调整。这种多任务处理能力极大提升了生产线的柔性和适应性。达宽科技的机器人力控系统,不*能够应对不同类型的工作任务,还能够优化工作流程,提高生产线的整体效率和多样性,满足客户对生产灵活性和快速响应的需求。
该方案能够适应各种尺寸和材质的胶塞,展现出良好的通用性和适应性。此外,通过达宽机器人力控系统能够实现自动调整以应对排气管的微小偏差,从而快速而准确地完成胶塞装配,显著提高装配的准确性和成功率。通过精确控制力,机器人力控系统可以让机器人在装配过程中施加的力始终保持在胶塞材料的承受范围内,从而避免胶塞损坏。在装配过程中,由于部件间接触的不确定性,力控传感器提供了关键的接触信息。达宽机器人力控系统利用这些信息,帮助机器人有效处理装配过程中的不确定性,减少错误,确保胶塞的正确装配。达宽科技的机器人力控装配系统具备灵活的超限报警功能,允许用户为每个监测方向设定两级报警阈值。此外,该系统还具备超限自动退出功能。一旦监测到超出设定的安全值,系统不*会发出警报信号,还会自动中断装配流程,以确保排气管的安全。达宽科技的机器人力控软件能够调节补偿力的大小和受力上限,从而提升装配的精确度和适应性。通过灵活调整补偿力,制造商可以更好地应对市场需求的变化,快速调整生产策略,以满足多样化的产品需求。达宽科技的机器人力控技术适应性强,能够处理各种复杂的力控任务,提升企业的生产灵活性与效率。

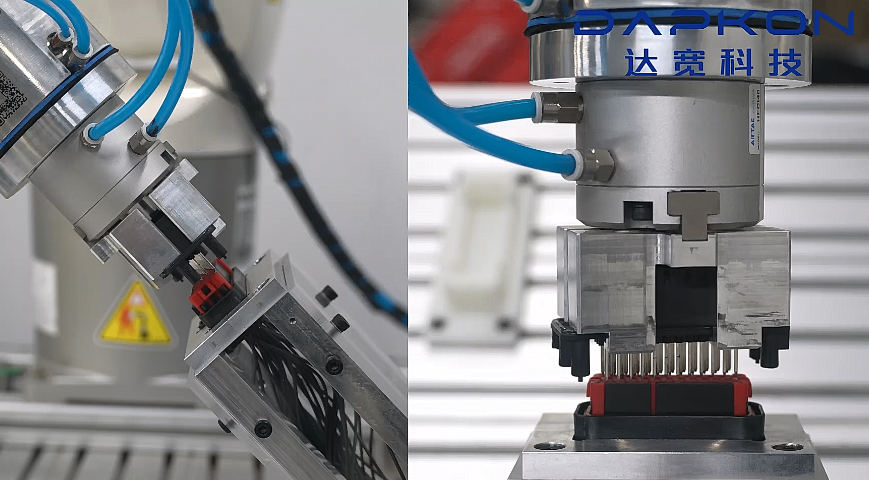
在数据中心中,服务器的线束装配与测试是一个复杂且耗时的过程。在传统人工装配过程中,服务器线束组装既耗时又费力,且易受人为因素影响,从而影响装配质量和效率的稳定性。对于自动化厂商,传统机器人装配在精确控制力度和位置方面仍存在不足,进而影响品控。服务器线束的接口比较脆弱,容易损坏。且装配过程中可能出现的微小偏差和不规则性,例如线材的弯曲或配件的尺寸差异。为了应对这些问题,达宽科技在多家服务器厂家的项目中,采取了机器人力控方案。机器人力控技术有效地提升了生产的稳定性,达宽科技的方案助力企业减少了意外停机的风险。山西协作机器人力控配置
机器人力控系统有效减轻了人工操作负担,达宽科技的技术助力客户提高生产线的稳定性和安全性。湖北协作机器人力控推荐
机器人力控技术,也称为力反馈控制技术,是指在机器人的操作过程中,通过将传感器检测到的力或力矩信息,反馈到控制系统,通过力控算法的解算,进而调整机器人的动作,以实现精确力控制的一种技术。想象一下,如果你的手能感觉到每一个细微的触感,并根据这些触感调整动作,这就是力控技术想要达到的效果。机器人力控技术的主要原理可以概括为以下几个步骤:1,力觉感知:利用力传感器检测机器人与外界环境的交互力。2,信号处理:将感知到的力信号进行一系列的滤波处理,去除一些不必要的噪音,然后将信号传输到控制系统。3,控制决策:根据信号和预设的控制算法,计算规划出机器人下一步的动作。4,执行动作:将控制指令传递给机器人的执行机构,实现精确的动作调整。湖北协作机器人力控推荐