商机详情 -
甘肃机器人柔性装配接头
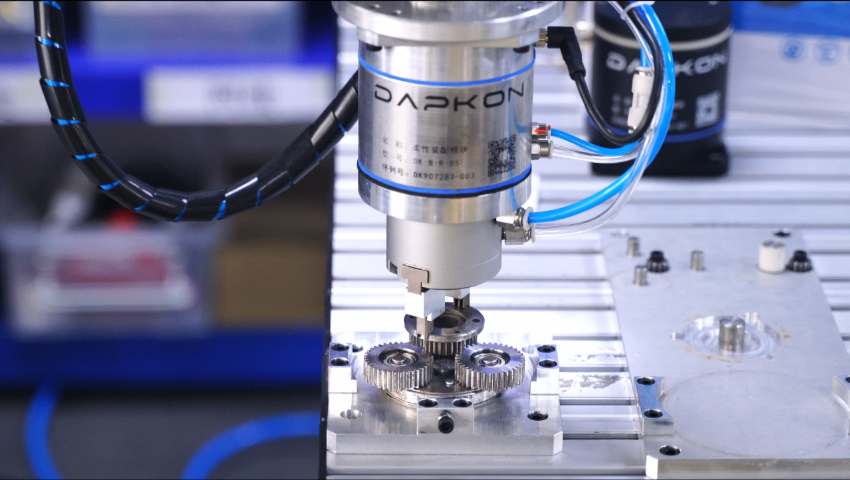
齿轮装配过程中,产品一致性是衡量生产质量的重要因素。达宽科技的机器人力控装配技术通过力位混合控制功能,为企业提供了可靠的工艺保障。传统装配方式常因操作人员经验差异或设备刚性不足,导致齿轮装配质量不稳定。而达宽科技的力控装配系统利用高精度传感器,实时监测力与位置数据,能够动态调整机器人动作,确保每个齿轮在一致的力学条件下完成装配。这种技术优势使齿轮与轴孔的啮合更加可控,减少了因公差或夹具误差导致的装配偏差。达宽科技的力控装配模块支持多种复杂工况,例如不同齿轮类型或材质的组合,能够通过自适应调节保持装配稳定性。企业在采用达宽科技的力控装配方案时,可以有效降低因质量不一致导致的废品率,从而节约生产成本。此外,该系统提供的数据记录功能支持生产过程的可追溯性,便于企业进行质量管理和工艺改进。无论在小批量生产还是大规模流水线作业中,达宽科技的机器人力控装配都能为企业提供稳定可靠的支持,帮助满足市场对高质量齿轮产品的需求。达宽力控助力汽车线束装配连贯性,减少中断,保障装配流程顺畅。甘肃机器人柔性装配接头
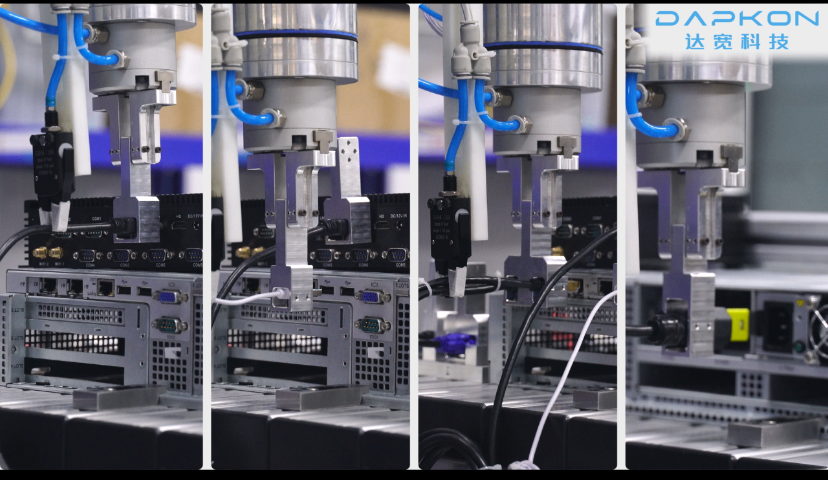
在工业自动化领域,机器人力控装配技术正逐步成为提升生产效率的关键工具。达宽科技专注于开发先进的力控装配系统,使机器人能够精确执行轴孔装配任务。通过实时力传感器和智能控制机制,力控装配允许机器人在装配过程中动态调整施加的力度,确保轴与孔的顺畅插入。这种方法减少了传统装配中的手动干预需求,帮助企业实现更流畅的生产流程。采用达宽科技的力控装配方案,企业可以观察到装配速度的提升,因为机器人能够连续工作而不受疲劳影响。力控装配还优化了资源利用,降低了能源消耗,从而支持可持续制造。达宽科技的力控装配系统设计简洁,易于集成到现有生产线中,提供即时的操作改进。在轴孔装配场景中,力控装配展现了高度适应性,处理不同尺寸和材料的部件时保持稳定。企业选择达宽科技的力控装配,能够迈出自动化转型的第一步,享受技术带来的长期效率提升。中国台湾机器人柔性力控装配方案力控装配简化繁杂工序,达宽力控助力机器人精确完成精细的行星齿轮装配工作。
电机传动可靠性高度依赖齿轮啮合力矩的均衡性。人工装配易受操作经验差异影响,而达宽科技的力控装配通过数字化闭环控制,确保每套行星齿轮的压装深度与轴向压力稳定在工艺窗口内。在减速器制造中,系统严格限定轴承预紧力区间,避免过载导致的齿面磨损或预紧力不足引发的运行异响。装配过程生成的力-位移曲线报告为工艺优化提供量化依据,从源头提升产品可靠性。力控装配的重复精度优势减少了磨合期故障率,延长了齿轮箱使用寿命,同时降低返修成本,帮助企业实现质量均衡的规模化输出。
达宽科技的力控装配方案在提升生产效率方面表现突出。在轴孔装配中,人工操作不*速度有限,还容易因疲劳导致效率波动,而普通机器人若缺乏力控能力,可能需要频繁停机调整参数。力控装配则能让机器人在遇到偏差时自主修正,减少停机次数,保持稳定的装配节奏。这种连续性不*节省了因调整而浪费的时间,还能让整条生产线的流转更加顺畅,从侧面为企业节省了时间成本,让生产计划得以更高效地推进。
对于追求产品质量稳定性的企业而言,达宽科技的力控装配方案是理想选择。轴孔装配的一致性直接影响产品的整体性能,人工装配时,不同操作人员的手法差异可能导致装配精度参差不齐。而力控装配通过标准化的力反馈调节机制,确保每一次轴孔对接的力度和位置都处于预设范围内,有效降低了因人为因素造成的产品差异。这种稳定的装配质量,让企业生产的产品在性能上更具可靠性,有助于提升企业在市场中的口碑,为企业的长远发展奠定坚实基础。 达宽科技机器人力控装配系统,装配电机齿轮时安全性高。过载保护功能可防止设备损坏。
安全性是工业操作的首要考量,机器人力控装配技术为轴孔装配环境带来了的安全改进。达宽科技的力控装配系统设计有内置安全机制,例如当机器人检测到异常力值时自动停止或调整动作,防止部件损坏或人员受伤。这种主动防护减少了工人接触高风险区域的需求,营造更安全的工作场所。在轴孔装配中,力控装配通过精确控制力度,避免了过度施力导致的设备故障或事故。企业实施达宽科技的力控装配方案后,可以降低工伤风险,提升整体运营安全性。力控装配还支持远程监控功能,让操作员从安全距离管理装配过程。达宽科技致力于使力控装配成为安全标准的一部分,提供易于使用的界面。选择力控装配,企业能够兼顾效率和安全,实现和谐生产。达宽科技的力控装配技术为企业打造了更可靠的防护屏障。达宽力控系统确保生产平稳,机器人稳定作业,推动行星齿轮装配流程顺畅进行.力控装配电机
选择达宽科技力控装配,开启电机齿轮装配高效模式。机器人与生产线无缝集成,提高生产自动化水平。甘肃机器人柔性装配接头
在现代工业生产中,轴孔装配是众多制造环节的关键步骤,而机器人力控技术的引入正为这一环节带来革新。达宽科技深耕机器人力控领域,其研发的力控装配方案,能够让机器人在轴孔装配过程中展现出更贴合实际需求的操作能力。传统的机器人装配往往依赖固定程序,面对轴孔之间微小的位置偏差或零件公差时,容易出现卡顿甚至损坏零件的情况。而力控装配通过内置的力传感器实时捕捉装配过程中的力反馈,让机器人能够根据实际接触情况灵活调整运动轨迹和力度,如同有经验的工人在操作时自然做出适应,从而顺利完成轴孔的精细对接,为企业的生产流程注入新的活力。甘肃机器人柔性装配接头