商机详情 -
山西机器人力控使用方法
达宽科技的机器人力控是服务器装配领域的一项创新技术。在内存条插拔环节,六维力传感器实时监测插槽阻力,当检测到针脚对准偏差时,系统自动微调角度与推力,确保一次对准。操作者只需预设力值范围,机器人力控便生成适配的插拔曲线,节省调试时间。这一方案让装配过程更加平稳,减少因误操作导致的针脚弯曲风险,提升装配效率的同时,保障了产品的一致性。
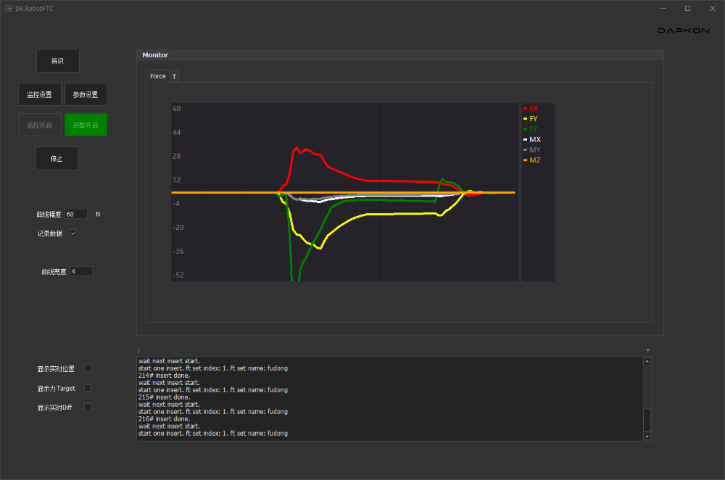
机器人力控的数据追溯功能为服务器装配带来额外价值。达宽科技的系统能记录每次装配的参数,方便质量追溯。若后续出现故障,工程师可回溯装配数据,快速定位问题源头。这一特性不*提升了产品一致性,还为持续改进提供了依据,助力企业优化生产流程。 机器人力控让电机装配更智能,机器人感知接触力,确保部件配合到位。山西机器人力控使用方法
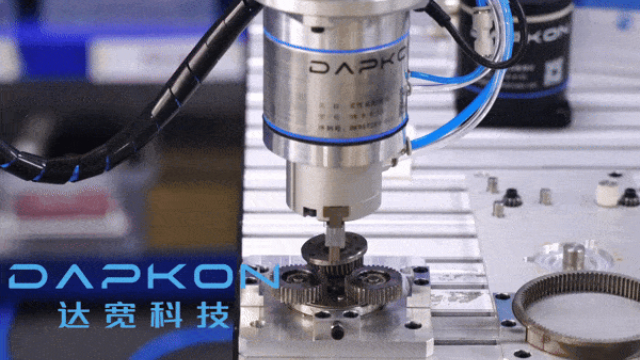
电机齿轮作为电机传动系统的关键部件,其产品一致性直接关系到电机的性能和可靠性。达宽科技的机器人力控系统在保障电机齿轮装配一致性方面发挥着作用。在装配过程中,力控系统为每一个齿轮的安装提供了标准化的力控参数。从齿轮与轴的初步接触,到终达到预定的啮合力矩,整个过程中的受力曲线都被严格控制在系统设定的范围内。相比之下,传统装配方式由于缺乏实时受力反馈,很难避免因力度差异导致的齿轮变形和啮合偏差。而力控系统的应用,使得电机齿轮的装配质量不再依赖于工人的经验和操作技巧,而是由精确的力控参数来保障。这种基于物理量反馈的质量控制方式,为电机齿轮的大规模、高质量生产提供了坚实的技术支撑,帮助企业在激烈的市场竞争中以的产品一致性脱颖而出。上海协作机器人力控装配机器人力控实时调节压装角度与力矩,避免行星架变形风险。

效率提升是机器人力控在服务器装配中展现的重要价值。传统人工装配时,操作人员需要反复核对部件位置、调整操作力度,难免因人为因素导致工序停顿或重复操作。机器人力控通过预设的力控参数和路径规划,让机器人能够自主完成定位、对接等流程,减少不必要的人工干预。达宽科技优化的机器人力控方案进一步提升了机器人的动作协调性和响应速度,使装配过程更流畅,有效缩短了单台服务器的装配周期,帮助企业在相同时间内完成更多产能,间接节省了时间成本。
引入达宽科技的机器人力控方案装配电机齿轮,为制造企业带来多方面价值提升。机器人力控让机器人在精密装配中具备更高的适应性和稳定性,既能满足小批量多型号的柔性生产需求,又能保障大批量生产的质量均衡。通过减少调试时间提升生产效率,通过稳定质量控制降低成本损耗,通过安全机制减少意外损失。这种全流程的优化能力,让机器人力控成为推动电机齿轮装配工艺升级的重要支撑,助力企业在动力部件制造领域持续提升生产效能与市场竞争力。机器人力控配备图形化编程模块,简化复杂检测流程配置。
采用先进的机器人力控技术进行行星齿轮装配,其价值不*体现在结果上,更在于优化了整个操作体验。达宽科技的机器人力控系统,强调用户友好性。直观的编程界面和预设的力控工艺模板,使得操作人员无需深厚的力控专业知识也能快速设定和启动装配任务。机器人力控系统处理了复杂的实时力交互过程,将操作人员从繁复的微调和监控中解放出来,使其能聚焦于更重要的任务管理和工艺优化。选择达宽科技的机器人力控解决方案,意味着为用户提供了一套易于驾驭、稳定可靠的工具,助力其更从容地实现行星齿轮的、高效率自动化装配。达宽科技机器人力控记录全流程装配参数,实现问题批次快速定位。甘肃机器人力控供应商
达宽科技机器人力控,装配电池线束更轻松,效率提升有保障。山西机器人力控使用方法
随着服务器技术的不断升级,其结构设计和装配工艺也在持续迭代,对装配设备的适应性提出了更高要求。机器人力控凭借良好的灵活性和可调节性,能够快速适配不同型号、不同规格服务器的装配需求。无论是小型服务器的紧凑部件装配,还是大型服务器的多模块对接,机器人力控都能通过参数调整实现高效适配。达宽科技始终聚焦机器人力控技术的创新优化,根据服务器行业的发展趋势,持续完善方案的适配能力,提供定制化的机器人力控配置,帮助企业快速响应产品迭代需求,推动服务器装配从传统模式向智能化、柔性化方向升级,为行业发展注入技术动力。山西机器人力控使用方法