商机详情 -
江苏协作机器人力控设计
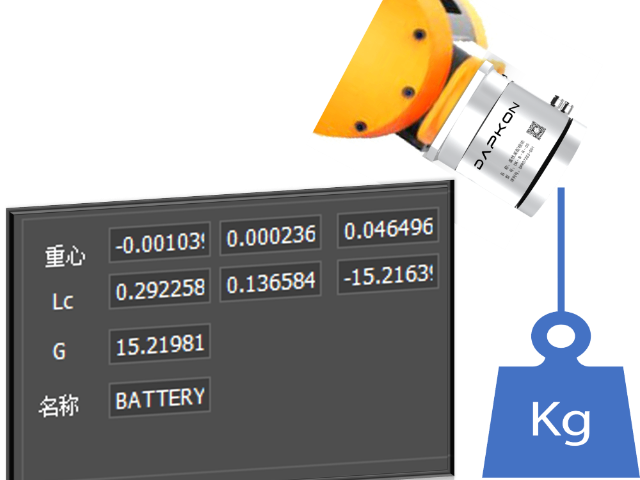
达宽科技的机器人力控表面处理方案,为用户提供一站式解决方案,无缝整合到现有机器人系统中,实现任务优化。该方案基于模块化设计,支持快速部署,帮助用户节省调试时间并提高处理效率。机器人力控的在于其自适应能力,能根据不同表面特性调整参数,确保一致输出。达宽科技通过专业支持和持续更新,让机器人力控易于维护,降低运营成本。在表面处理应用中,如电子元件涂层,达宽科技的机器人力控方案提升了产品可靠性,同时增强安全性。用户可通过达宽科技官网了解更多,开启自动化革新之旅。机器人力控正重塑行业标准,赋能企业迈向高效、可靠的生产新时代。机器人力控系统实时校准插接角度与力度,提升电池线束装配一致性与可靠性。江苏协作机器人力控设计

产品一致性是表面处理领域的关键要求,而机器人力控技术为保障一致性提供了可靠支撑。人工操作时,受经验、体力、情绪等因素影响,不同操作人员或同一操作人员在不同时段的作业效果往往存在差异,难以保证产品质量的均匀性。机器人力控通过精细的力值控制和路径规划,让机器人在每一个作业环节都能保持稳定的力度和轨迹,确保同一批次甚至不同批次产品的表面处理效果高度一致。达宽科技的机器人力控方案具备灵活的参数设置功能,企业可以根据不同产品的工艺要求定制力控参数,从技术层面消除人为因素对产品质量的影响,提升产品的整体品质稳定性。
江苏协作机器人力控设计机器人力控配备图形化编程模块,简化复杂检测流程配置。
产品一致性是电机装配的要求,机器人力控在此发挥关键作用。传统装配中,机器人缺乏力觉反馈,易出现轴承压装过紧导致转动阻力增大,或过松造成运行晃动的问题,影响电机性能稳定性。达宽科技的机器人力控系统通过预设合理的力值区间,实时监测装配过程中的力觉变化。在轴承压装阶段,系统控制机器人输出均匀力度,确保压装深度与紧密度一致。这种稳定的力控能力让每台电机的装配质量保持均衡,降低因个体差异导致的后续检测返工情况。
产品一致性是线束装配的重要要求,力控系统为此提供了可靠保障。人工装配时,受经验差异、体力变化等因素影响,同一批次线束的装配紧密度、接头连接稳定性可能出现差异,影响产品质量稳定性。力控系统通过预设的力值参数和路径规划,确保机器人在每一次插拔、缠绕动作中保持一致的力度和精度,让不同工件的装配效果趋于统一。达宽科技的力控系统支持灵活的参数定制,企业可根据不同线束的工艺标准调整力控参数,从技术层面减少人为因素对装配质量的影响,助力提升产品的一致性。达宽科技机器人力控循环执行万次压力测试,加速疲劳数据采集。
达宽科技的机器人力控是服务器装配领域的一项创新技术。在内存条插拔环节,六维力传感器实时监测插槽阻力,当检测到针脚对准偏差时,系统自动微调角度与推力,确保一次对准。操作者只需预设力值范围,机器人力控便生成适配的插拔曲线,节省调试时间。这一方案让装配过程更加平稳,减少因误操作导致的针脚弯曲风险,提升装配效率的同时,保障了产品的一致性。
机器人力控的数据追溯功能为服务器装配带来额外价值。达宽科技的系统能记录每次装配的参数,方便质量追溯。若后续出现故障,工程师可回溯装配数据,快速定位问题源头。这一特性不*提升了产品一致性,还为持续改进提供了依据,助力企业优化生产流程。 机器人力控连续执行耐久性测试,替代低效人工重复操作。江苏协作机器人力控设计
机器人力控让电机装配更智能,机器人感知接触力,确保部件配合到位。江苏协作机器人力控设计
PCBA装配涉及高密度电子元器件的精细操作,对接触力控制提出极高要求。机器人力控技术为这一领域带来革新性解决方案。在连接器插接、屏蔽罩安装等关键工序中,机器人力控系统通过实时感知六维力,动态调整机械臂的位姿。达宽科技开发的机器人力控方案,集成多轴向力觉传感与自适应控制机制,确保FPC排线、板对板连接器等脆弱部件防止损伤装配。操作人员设定安全力阈值后,机器人力控系统即可自主完成毫米级精度的贴合过程,有效规避传统刚性装配导致的引脚弯折或焊盘脱落风险。这种基于实时力反馈的装配方式,提升精密电子组件的首装合格率。江苏协作机器人力控设计