商机详情 -
浙江电池系统汽车仿真控制工具
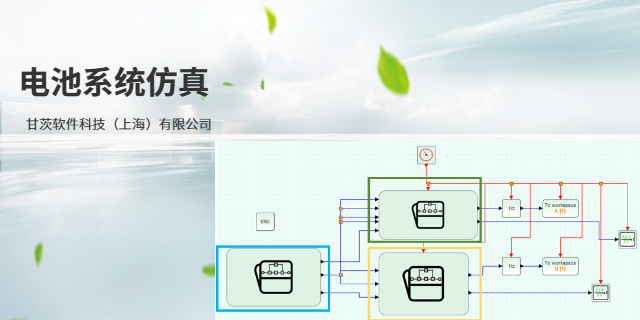
车辆电学物理仿真验证工具用于分析汽车电路系统的电气特性与物理表现,保障用电安全与功能可靠性。工具需能搭建整车电路网络模型,包含蓄电池、发电机、各类用电器的电气参数,模拟不同工况下的电压分布、电流波动,计算导线温升与功率损耗。针对新能源汽车高压系统,需仿真绝缘电阻变化、高压互锁故障,验证高压安全策略的有效性;低压系统则需测试启动瞬间的电压跌落对ECU的影响,确保关键控制器正常工作。工具还应支持电磁兼容(EMC)分析,模拟线束间的电磁干扰,为电路布局优化提供依据,减少实车电磁兼容测试的整改成本。汽车模拟仿真定制开发需理解企业需求,从建模到流程均做针对性设计调试。浙江电池系统汽车仿真控制工具

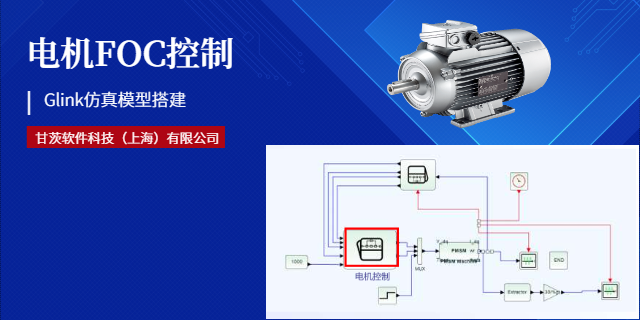
动力系统汽车模拟仿真技术基于多物理场耦合与控制理论,通过数学建模复现动力传递与能量转换过程。其重点是构建各部件的机理模型:发动机模型基于热力学方程计算进气量、喷油量与输出扭矩的关系,包含节气门开度、点火提前角等关键参数的影响;电机模型通过电磁方程模拟电流、转速与扭矩的动态响应,考虑磁饱和、涡流损耗等非线性特性;变速箱模型则依据齿轮传动比与效率特性计算动力传递损耗,包含换挡过程中的离合器结合/分离动态模拟。仿真过程中通过控制算法模型(如发动机ECU逻辑、电机FOC控制)实现各部件协同,求解动力系统在不同输入下的动态响应,通过数值计算输出动力性能指标,为动力系统设计提供理论依据。电池系统汽车模拟仿真建模软件电池系统汽车模拟仿真需综合续航、安全等指标,这样才能保证模拟结果具有实用价值。
动力系统仿真验证软件的准确性体现在模型精度与多工况适应性上。专业软件需具备精细化的动力部件模型库,发动机模型能反映进气、燃烧、排气的动态过程,电机模型可准确描述电磁特性与效率特性,变速箱模型则包含齿轮传动效率与换挡动力学特性。软件应能模拟不同工况下的动力传递过程,如怠速稳定性、急加速响应、高速巡航状态,计算动力输出、能耗水平等关键指标,且仿真结果与实车测试数据的偏差需控制在合理范围。同时支持实车数据导入与模型参数校准,通过迭代优化提升仿真精度,这类软件能为动力系统的匹配验证与性能优化提供准确依据。
自动驾驶汽车模拟仿真通过构建虚拟测试场,复现海量交通场景以验证系统的感知、决策与控制能力。感知层仿真需模拟摄像头、激光雷达在不同光照、天气下的原始数据,包含噪声、畸变等真实特性,测试传感器融合算法的目标识别精度;决策层则通过状态机模型模拟车道保持、紧急避让等逻辑,在千级以上场景中验证决策策略的安全性。控制层需结合车辆动力学模型,测试转向、制动指令的执行效果,确保轨迹跟踪误差在合理范围。仿真过程中可注入传感器失效、通信延迟等故障,多方位评估系统的容错能力,为自动驾驶算法迭代提供高效验证手段。汽车控制器应用层仿真软件开发需贴合控制逻辑,通过虚拟调试优化代码,降低实车测试风险。
自动驾驶汽车仿真工具的准确性取决于场景覆盖度、传感器模型精度、动力学仿真能力与算法迭代适配性。在场景覆盖方面,能生成海量多样化场景(如极端天气、特殊路况、复杂交通参与者交互)的工具更具优势,可测试算法的鲁棒性;传感器模型需准确模拟激光雷达点云噪声、摄像头畸变、毫米波雷达信号衰减等特性,确保感知算法测试的真实性;动力学模型则需准确反映车辆的加速、制动、转向响应,验证决策控制算法的执行效果。支持多域联合仿真、可导入高精度地图与实时交通数据的工具更能提升准确性,能模拟复杂交通参与者的交互行为。在实际应用中,往往需要结合多种工具的优势,通过实车数据校准模型参数,实现对自动驾驶系统的准确仿真测试。新能源汽车模拟仿真服务含性能仿真、问题诊断,为研发提供数据支持与改进建议。浙江电池系统汽车仿真控制工具
汽车发动机控制器ECU仿真通过控制逻辑模型,模拟传感器与执行器的信号匹配。浙江电池系统汽车仿真控制工具
汽车联合仿真建模软件通过标准化接口实现多域模型的无缝集成,支持整车性能的跨学科协同优化。软件需兼容多体动力学、流体力学、控制算法等不同类型模型,定义统一的数据交互格式,实现不同工具的联合仿真。在底盘开发中,可将悬架多体模型与PID控制模型联合,分析控制参数对操纵稳定性的影响;动力系统开发中,能整合发动机热力学模型与变速箱动力学模型,优化换挡时机与动力输出。软件应具备高效的协同仿真引擎,支持分布式计算以提升大规模模型的求解速度,为整车多目标优化(如动力性与经济性平衡)提供强大技术支撑。浙江电池系统汽车仿真控制工具