商机详情 -
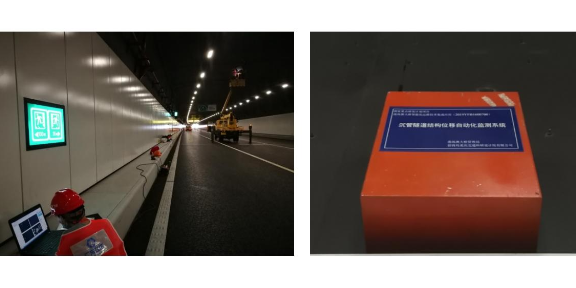
隧道巡检机器人技术原理
图像位移计在地灾监测领域有多种应用场景,包括但不限于以下几个方面:1.边坡稳定性监测:图像位移计可以实时监测边坡的位移变化,包括岩石边坡、土质边坡等,及时发现边坡变形和位移加速度异常,为边坡稳定性评估和预警提供数据支持。2.斜坡滑坡监测:图像位移计可以用于斜坡滑坡的监测和预警,通过对滑坡区域的图像位移变化进行实时监测,可以预测滑坡发生的可能性和趋势,提供及时的预警信息。3.地震灾害监测:地震引发的地表位移是地震灾害的重要指标之一,图像位移计可以实时监测地震后的地表位移变化,包括地震引起的平移、抬升、沉降等,提供地震灾害监测与评估的数据支持。4.河道堤坝安全监测:图像位移计可以用于河道堤坝的安全监测,通过监测堤坝表面的位移变化,及时发现河道堤坝的变形和位移异常,为堤坝安全评估和管理提供数据支持。5.地下工程监测:图像位移计可以用于地下工程的监测和观测,如隧道、地铁、地下管线等,通过监测地下结构的位移变化,及时发现地下工程的变形情况,为工程的管理和维护提供数据支持。6.岩体监测:图像位移计可用于岩体的位移监测,对岩体的滑动、断裂、塌陷等行为进行实时监测,为岩体稳定性评估和灾害预警提供数据支持。位移计的未来发展方向是什么?隧道巡检机器人技术原理
位移计是一种用于测量物体的位移或变形的仪器。它在许多领域中都有广泛的应用,包括工程、建筑、地质、材料科学等。随着科技的不断进步和需求的不断增长,位移计的未来发展趋势也将受到一系列的影响和变化。以下是一些可能的未来发展趋势:精度和灵敏度的提高:随着科技的进步,位移计的精度和灵敏度将不断提高。新的传感器技术和信号处理算法的引入将使得位移计能够更准确地测量微小的位移和变形。无线传输和远程监测:传统的位移计通常需要通过有线连接来传输数据,限制了其应用范围和便利性。未来的位移计可能会采用无线传输技术,使得数据可以远程传输和监测。这将使得位移计在一些特殊环境或难以接触的地方得到更广泛的应用。成都视频位移计采购位移计可以精确地测量物体的位移或位移速度。

位移计是一种用于测量材料位移的仪器。它可以通过测量物体的位置变化来确定其位移量。位移计广泛应用于工程、材料科学、地质学等领域,用于研究材料的变形性能、结构的稳定性以及地壳运动等。位移计的工作原理基于物体的位置变化。它通常由一个固定的参考点和一个可移动的测量点组成。当物体发生位移时,测量点相对于参考点的位置也会发生变化。位移计通过测量这种位置变化来确定物体的位移量。不同的应用场景和要求可能需要选择不同的位移计。在实际应用中,还可以根据需要进行位移计的精度、测量范围、稳定性等方面的选择。
除了价格优势,图像位移计还具有其他方面的优势。首先,图像位移计的安装和部署相对简单快速,不需要进行繁琐的工程改造,节省了时间和成本。其次,图像位移计采用非接触式测量方式,无需直接与被监测结构接触,不会对结构产生任何影响或破坏,确保了监测过程的安全性和完整性。此外,图像位移计具有较高的测量精度和稳定性,能够实时准确地监测结构的位移和变形情况,提供可靠的监测数据作为工程决策的依据。另外,图像位移计通常具备实时数据传输和远程监测的能力,工程师可以随时随地通过云端平台或移动设备查看监测结果,及时响应异常情况。综上所述,图像位移计不*在价格上具有优势,还拥有安装便捷、非接触式测量、高精度稳定性和远程监测等诸多优势。相机位移计的原理是什么?
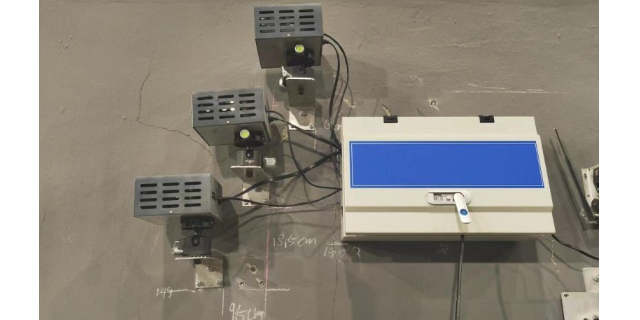
具体来说,图像位移测量系统的工作流程如下:标记物的放置:在被测物体表面上放置一些标记物,例如精确的点、线或网格。这些标记物应该能够在不同的图像中被准确地识别和匹配。图像采集:使用相机拍摄这些标记物的图像。为了获得更好的测量精度,相机应该具有高分辨率、高灵敏度和低噪声等特点。图像处理:将图像输入到计算机中进行处理。图像处理软件会自动识别标记物,并计算它们在不同图像之间的位置和形变。这个过程通常包括图像增强、特征提取、匹配和跟踪等步骤。三角测量:通过三角测量原理,将标记物的位置和形变转换为物体或结构的位移和形变。三角测量原理是一种基于三角形相似性原理的测量方法,它可以通过已知的三角形边长和角度来计算未知的边长和角度。数据分析:对测量结果进行分析和处理。这个过程通常包括误差分析、数据可视化、统计分析和模型拟合等步骤。位移计的发展趋势是什么?工程位移计品牌推荐
材料试验位移计可以帮助我们评估材料的力学性能和变形特性。隧道巡检机器人技术原理
相机位移计是一种用于测量相机在空间中的位移和姿态变化的设备。它通常由多个传感器和算法组成,可以精确地测量相机的位置和方向,从而实现图像稳定、导航和姿态控制等应用。相机位移计的工作原理可以分为两个主要步骤:传感器测量和姿态估计。传感器测量:相机位移计通常使用多种传感器来测量相机的位移和姿态变化。常见的传感器包括加速度计、陀螺仪、磁力计和视觉传感器等。加速度计:加速度计可以测量相机在三个轴向上的加速度。通过积分加速度信号,可以得到相机的速度和位移信息。陀螺仪:陀螺仪可以测量相机绕三个轴向的角速度。通过积分角速度信号,可以得到相机的姿态信息。磁力计:磁力计可以测量地球磁场的方向,从而提供相机的方向信息。视觉传感器:视觉传感器可以通过分析相机拍摄的图像来估计相机的位移和姿态变化。这种方法通常称为视觉里程计或视觉惯性导航。这些传感器通常以高频率采样数据,并通过滤波和校准等技术进行数据处理,以提高测量的准确性和稳定性。隧道巡检机器人技术原理