-

 可靠图像处理板要求
发布时间:2024.08.18
可靠图像处理板要求
发布时间:2024.08.18
在地铁站的站厅等区域,一般是通过多路视频对整个站厅进行监视。但由于站内点位过多,监控点位较分散,所以运营人员想要查看某个点位时,需要从冗长的设备列表中根据设备名称选择相应点位,效率较低。如果可以将设备...
-
 耐用图像处理板结构设计
发布时间:2024.08.17
耐用图像处理板结构设计
发布时间:2024.08.17
图像识别技术是信息时代的一门重要的技术,其产生目的是为了让计算机代替人类去处理大量的物理信息,随着计算机技术的发展,人类对图像识别技术的认识越来越深刻。图像识别技术的过程分为信息的获取、预处理、特征抽...
-
 光纤数据图像处理板市场报价
发布时间:2024.08.17
光纤数据图像处理板市场报价
发布时间:2024.08.17
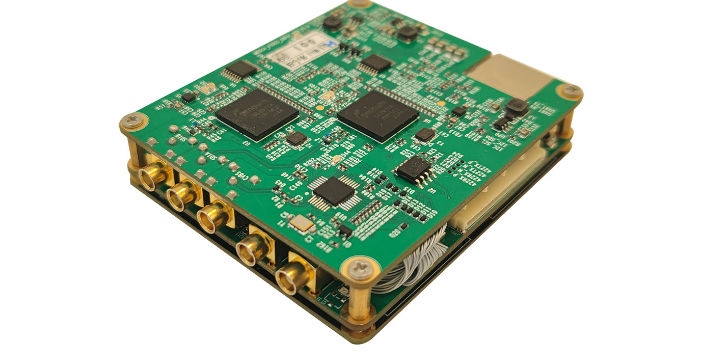
采用RV1126芯片开发的Viztra-LE026图像处理板是我司自主研发的目标跟踪板,该板卡采用国产高性能CPU,搭载自研目标检测及跟踪算法。具有体积小、功耗低、目标检测准确、跟踪稳定等优点。用在无...
-
 内蒙古图像处理板检测
发布时间:2024.08.16
内蒙古图像处理板检测
发布时间:2024.08.16
在地铁站的维修区域、主要区域,一般会设置禁入标志,防止乘客进入。如果有乘客违规闯入,可能会发生被维修工具所伤、跌倒、或触碰关键部件影响地铁运营等事件。如果能及早发现乘客闯入禁入区域事件,运营人员可及时...
-
 上海可靠远程桌面
发布时间:2024.08.15
上海可靠远程桌面
发布时间:2024.08.15
在线办公可以大幅度提高员工的生活质量。由于不再局限于固定的办公空间,员工将摆脱办公工作加强生活、监禁和束缚的枷锁,同时更有效地提高生产力,可以考虑鱼和熊掌。第二,这种相对时尚、更开放的办公方式可以吸引...
-
 辽宁RK3399主板图像识别模块电子元器件
发布时间:2024.08.14
辽宁RK3399主板图像识别模块电子元器件
发布时间:2024.08.14
激光除草是通过激光照射杂草,使草叶内部细胞脱水破裂死亡的物理靶向除草方法。哈工大机器人实验室与华工科技合作研发的全天候智能激光除草机器人集成深度学习的人工智能技术,AI智能识别杂草,十分高效;同时针对...
-
贵州视频图像识别模块方法
发布时间:2024.08.14
巡检机器人能够实现抵近待测设备,进行精细的测温、测量以及感应。同时具备自主导航、实时避障功能,能够智能规划比较好巡检路径、规避站内检修区域,效率是人工的好几倍,并且还不会出现传统人工巡检造成人身危害等...
-
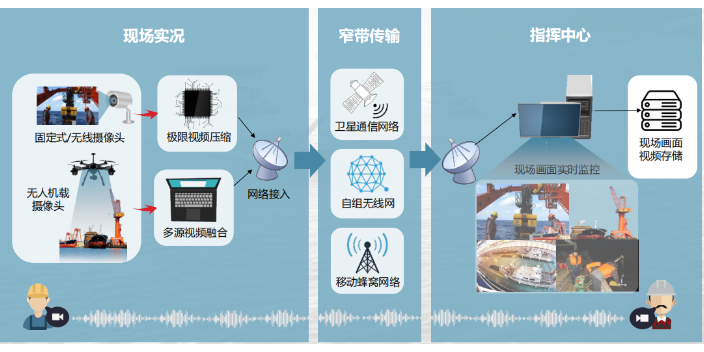
 湖北银行视频压缩与传输专业方案
发布时间:2024.08.13
湖北银行视频压缩与传输专业方案
发布时间:2024.08.13
华为mate60pro的悄然发布,让卫星通信走入了C端用户的视野,随后小米等企业迅速跟上,似乎,卫星通信又迎来了进一步落地应用的契机。其实,卫星通信在我们的日常生活中很常见,只是身处城市中的我们很少遇...
-
 多系统适配远程桌面
发布时间:2024.08.12
多系统适配远程桌面
发布时间:2024.08.12
与传统的办公方式相比,远程办公确实存在明显的成本和效率优势。大流行期间,大部分企业依靠“异地办公”、“移动办公”等方式让企业维持内部的正常运营,员工大多处于居家办公模式,不*解决了通勤问题,每天可以自...
-
 湖北边海防AI智能目标跟踪
发布时间:2024.08.11
湖北边海防AI智能目标跟踪
发布时间:2024.08.11
机器视觉具有定位、识别、测量与检测四大功能,在工业领域中,机器视觉可以快速、准确地获取大量信息,并且易于自动处理,因此在质量检测方面有着广泛应用。而AI图像处理板只是实现这些功能的关键传感器。目前,国...
-
 重庆AI智能解决方案
发布时间:2024.08.11
重庆AI智能解决方案
发布时间:2024.08.11
虽然现在各种公共交通已十分便捷,但是仍然存在许多无证、无资质的车辆,这些车辆无视交通法规,所以超速超载,俨然成为公路安全一大隐患。例如在车站出入口,经常会有很多人进行拉客,虽然说是坐满就走,但是为了利...
-
 甘肃弱网视频压缩与传输
发布时间:2024.08.10
甘肃弱网视频压缩与传输
发布时间:2024.08.10
当极端天气出现时,持续性的暴雪可能会对受灾地的交通、通信造成危害,外界和受灾地之间急需互相通信以获得实时状况,便于开展应急指挥和救援。如果等待传统通信的修复,势必会丧失比较好救援时机,此时,卫星通信就...
-
 北京国产远程控制软件参考价格
发布时间:2024.08.10
北京国产远程控制软件参考价格
发布时间:2024.08.10
曾经的国产化产品,性能差,稳定性也差,被许多厂商所诟病。如今在大环境的驱动下,资本纷纷投入芯片、软件等科技产业,在资金的加持下不断优化迭代,目前国产的许多产品已经逐渐能满足性能需求,同时价格相比于国外...
-
 四川国产化目标识别郑重承诺
发布时间:2024.08.09
四川国产化目标识别郑重承诺
发布时间:2024.08.09
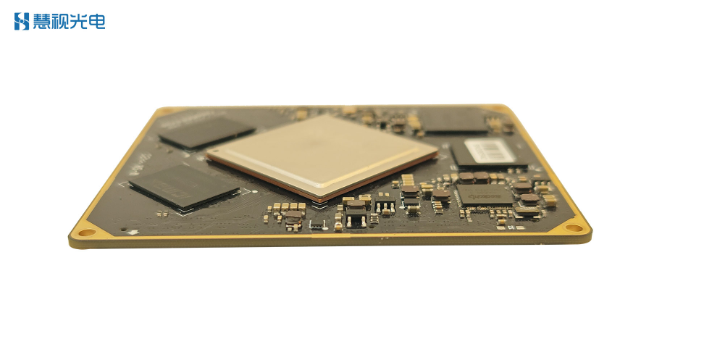
虽然AI图像处理板的功能很强大,但它并不是什么遥不可及的技术。成都慧视凭借多年开发经验打造出的Viztra-HE030图像处理板,就能够凭借强大的处理性能,在工业4.0领域发光发热。这块图像处理板采用...
-
 天津高性能目标识别办公软件
发布时间:2024.08.09
天津高性能目标识别办公软件
发布时间:2024.08.09
十秒速成写歌,声音面容一件替换,或许未来已经不需要歌手存在,AI如今已经在我们生活的方方面面落地应用。除了这些娱乐领域外,AI在我们工作上的帮助作用也非常巨大,图像标注就是其中之一。成都慧视利用AI开...
-
 湖南电力巡检AI智能智能方案
发布时间:2024.08.09
湖南电力巡检AI智能智能方案
发布时间:2024.08.09
高空坠物已经成为城市安全的一大威胁,一方面来自于人,而另一方面则来自于建筑物。以前的楼房大都是马赛克墙面,然后在外面再涂一层亚士漆作为保护,随着楼房建成年份变久,楼房的外立面历经风吹雨晒,就会出现、起...
-
 陕西视觉算法图像识别模块接口丰富
发布时间:2024.08.09
陕西视觉算法图像识别模块接口丰富
发布时间:2024.08.09
要解决这个难题,慧视光电的算法工程师给出了小目标识别算法的方案,通过加强目标特征、数据增广、放大输入图像、使用高分辨率的特征、设计合适的标签分配方法,以让小目标有更多的正样本、利用小目标所处的环境信息...
-
 江西移动目标识别自主可控
发布时间:2024.08.08
江西移动目标识别自主可控
发布时间:2024.08.08
中国当前比较先进的农业生产基地中,一辆辆收割机在田野间来回穿梭,无比繁忙,但是驾驶室中却空无一人。这种无人作业的方法能够极大提升效率,使播种、施肥、旋耕、开沟一体化,实现农产品生产的降本增效。要想实现...
-
广东人防目标识别定制
发布时间:2024.08.08
YOLO系列算法是目标识别领域很重要的技术之一,因为性能强大、消耗算力较少,一直以来都是实时目标检测领域的主要范式。该框架被用于各种实际应用,包括自动驾驶、监控和物流等行业的目标识别。自今年2月YOL...
-
贵州可靠远程桌面远程控制
发布时间:2024.08.08
孩子的教育一直是家长们关心的重点,如今,孩子们越来越早的就接近网络了,在我国,网民的年龄一直在不断下降,这就意味着,年龄较小的学生以及开始慢慢使用互联网,虽然家长们在家可以监督控制孩子,老师可以在课堂...
-
 内蒙古目标识别工具
发布时间:2024.08.08
内蒙古目标识别工具
发布时间:2024.08.08
奔跑是人形机器人的一大进步,而代替人工作则是他落地应用的目的。机器人想要代替人工,视觉方面的传感器至关重要,目前可以用图像处理的方法给人形机器人装上“视觉神经”。这就是高性能的AI图像处理板。这种板卡...
-
 上海省时省力目标识别自主可控
发布时间:2024.08.07
上海省时省力目标识别自主可控
发布时间:2024.08.07
YOLO系列算法是目标识别领域很重要的技术之一,因为性能强大、消耗算力较少,一直以来都是实时目标检测领域的主要范式。该框架被用于各种实际应用,包括自动驾驶、监控和物流等行业的目标识别。自今年2月YOL...
-
广东省时省力目标识别办公软件
发布时间:2024.08.07
水上交通是我国内陆运输的一大命脉,尤其是长江沿岸,从长江一路向东走向世界是比较经济的运输模式,为了保障水路运输的通畅,维护通航秩序,就需要相关部门对航道进行定期巡航,保障水上交通安全。传统的航道巡查采...
-
 黑龙江目标识别郑重承诺
发布时间:2024.08.07
黑龙江目标识别郑重承诺
发布时间:2024.08.07
这种AI图像处理板在国内也有很多企业在做,但是由于国内的人形机器人发展程度不如国外,所以AI图像处理板的应用也不尽人意。成都慧视开发的高性能图像处理板Viztra-HE030就十分适合用在人形机器人领...
-
 江苏数据目标识别编号
发布时间:2024.08.07
江苏数据目标识别编号
发布时间:2024.08.07
节假日的高速路段通常会长达几小时甚至通宵堵车的状况,此时,普通的无人机吊舱就无法满足夜间的巡逻工作。而慧视光电推出的VIZ-GT07D三轴双光微型吊舱,是一款微型的三轴双光惯性稳定吊舱,集成了640×...
-
河北目标识别开发
发布时间:2024.08.06
不久前,国外的IDEA研究院团队推出了Grounding dino 1.5,它能够实现端侧实时识别。在图像和文本的语义理解上表现出色,能够快速、准确地根据语言提示检测和识别图像中的目标对象。作为当前性...
-
 云南稳定目标识别工具
发布时间:2024.08.06
云南稳定目标识别工具
发布时间:2024.08.06
防止电瓶车入户是社区安防一项重点工作,许多社区在政策的严令之下采取了许多措施,其中不乏人车分流,人工巡逻等,但是都不能长时间大范围的监督,总会出现漏网之鱼,因此更加先进的技防措施崭露头角,图像处理技术...
-
 黑龙江目标识别24小时服务
发布时间:2024.08.06
黑龙江目标识别24小时服务
发布时间:2024.08.06
AI真的越来越智能了,让许多岗位从业人员人人自危。数据标注师就是其中之一。AI替代人类首先就会从一些枯草、机械重复的工作开始,数据标注的工作恰好符合这个特点。在以往,数据标注的工作是AI的赋能者,他们...
-
 北京数据目标识别经验丰富
发布时间:2024.08.06
北京数据目标识别经验丰富
发布时间:2024.08.06
在使用无人机时,往往需要一款轻量化、功耗低、耐用高的吊舱,帮助进行户外作业,如果有高空目标识别跟踪的需求,则需要一个带有图像处理功能的吊舱,这种吊舱就是在内部植入高性能的AI图像处理板,这两者通常情况...
-
 江西多系统适配远程桌面远程控制
发布时间:2024.08.05
江西多系统适配远程桌面远程控制
发布时间:2024.08.05
慧视光电旗下产品“慧视远程操控系统”,是响应国家信创国产化的号召,倾力研发的一款专为国产软硬件量身打造的远程桌面工具。为解决政企国企等信创产业用户远程办公、远程运维需求,提供信创体系下安全、稳定、实时...