新闻中心 - 扬州熙岳智能科技有限公司
-
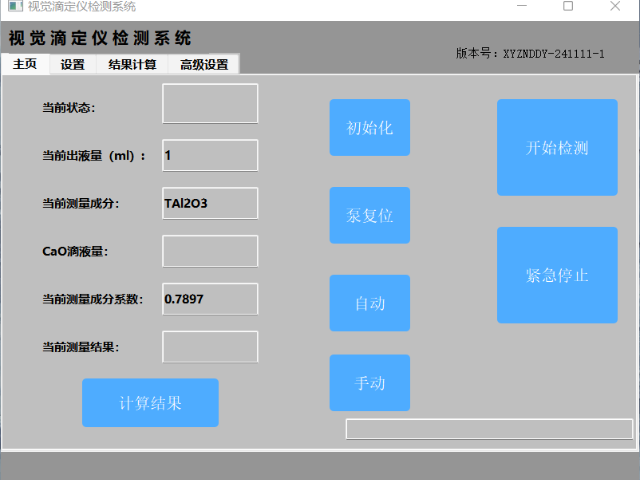 湖北智能视觉滴定仪好不好
湖北智能视觉滴定仪好不好视觉滴定仪当前系统面临三大技术瓶颈:对浑浊样品(如乳制品)的透射分析误差率超过12%;在极端温度条件下(>80℃)的光学漂移现象;多组分混合体系的响应曲面建模复杂度呈指数级增长。突破路径包括:采用量子...
发布时间:2025.06.13 -
 浙江铅酸电池瑕疵检测系统制造价格
浙江铅酸电池瑕疵检测系统制造价格熙岳智能瑕疵检测系统的每一次升级,都不**是技术层面的简单更新,更是对品质追求的一次深刻践行与飞跃。在每一次升级过程中,熙岳智能的研发团队都会深入剖析市场需求与客户反馈,结合新的技术趋势与研究成果,对...
发布时间:2025.06.12 -
 徐州密封盖瑕疵检测系统产品介绍
徐州密封盖瑕疵检测系统产品介绍熙岳智能深知,在日新月异的科技时代,唯有不断创新与研发,才能保持技术的**地位与市场的竞争优势。因此,公司始终将研发视为企业发展的**驱动力,持续加大在瑕疵检测领域的研发投入。熙岳智能汇聚了一支由行业...
发布时间:2025.06.12 -
 南京榨菜包瑕疵检测系统制造价格
南京榨菜包瑕疵检测系统制造价格瑕疵检测系统,作为现代制造业中不可或缺的重要工具,其价值在于能够提升产品质量与生产效率。在产品质量方面,该系统通过高精度的检测与识别技术,能够及时发现并剔除产品表面的瑕疵,确保每一件产品都符合严格的质...
发布时间:2025.06.10 -
 吉林铅板定制机器视觉检测服务趋势
吉林铅板定制机器视觉检测服务趋势机器视觉检测采用条码质量追溯系统后,工作更简单、方便、准确和快捷。通过数据的采集、管理、检索、存档和统计实时化,质量信息动态地反映生产现状使生产管理者能及时、准确、详细地了解生产情况。产品的自我辨别也...
发布时间:2025.06.09 -
 扬州压装机瑕疵检测系统按需定制
扬州压装机瑕疵检测系统按需定制瑕疵检测系统,以专业的检测能力与高精度的识别技术,成为了现代制造业中提升产品质量的重要利器。该系统不*具备检测常规瑕疵的能力,更能深入细微之处,精细捕捉并识别出产品表面的微小瑕疵。这些微小瑕疵可能肉眼...
发布时间:2025.06.09 -
 天津铅板定制机器视觉检测服务性能
天津铅板定制机器视觉检测服务性能瑕疵检测系统采用超声波技术实现对产品内部缺陷检测,这为产品质量检测提供了一种极为有效的手段。超声波具有良好的穿透性,能够深入产品内部,当遇到内部缺陷如裂纹、空洞、夹杂等时,超声波会发生反射、折射和散射...
发布时间:2025.06.08 -
 福建电池片阵列排布定制机器视觉检测服务服务价格
福建电池片阵列排布定制机器视觉检测服务服务价格瑕疵检测系统具备出色的兼容性,能够与其他生产设备进行无缝集成,从而有力地推动自动化生产的实现。在现代化的工厂车间里,各种生产设备相互协作,共同完成产品的制造过程。瑕疵检测系统作为质量把控的关键环节,可...
发布时间:2025.06.07 -
河南铅酸电池定制机器视觉检测服务公司
瑕疵检测系统依靠电子技术实现对产品表面的电气检测。在涉及电子产品或带有电气元件的产品时,电子技术的应用尤为关键。系统可以通过专门的电子测试探针与产品表面的电气触点相连,测量其电气参数如电阻、电容、电感...
发布时间:2025.06.06 -
 江西木材定制机器视觉检测服务技术参数
江西木材定制机器视觉检测服务技术参数南京熙岳智能科技有限公司同时,通过识别技术对数据进行采集、输出,使得采集和输出的数据更为精确。随着产品及组件的质量标准面临着越来越严格的法规要求,条形码、二维码的阅读、验证及分级在许多检测过程中变得愈...
发布时间:2025.06.06 -
浙江电池片阵列排布定制机器视觉检测服务售价
瑕疵检测系统借助图像处理技术显著提高了瑕疵检测的准确性。图像处理技术是该系统的技术之一,它涵盖了多个复杂且精密的环节。首先,在图像采集阶段,系统会采用高分辨率、高帧率的摄像头,并配备合适的照明设备,以...
发布时间:2025.06.05