标签列表 - 杭州渊博五金机械有限公司
-
 淮安点胶加工现货
淮安点胶加工现货[0060]步骤S4,将点胶针头200向上移动距离H1后,采用寸进方式每次向下移动一距离h,至微动开关,记录此时第三方向坐标为Z1。h<H1<H。说明书4/6页8CNB8[0061]具体地,通过第三驱动件13将点胶针头200向上移动,随后,控制点胶针头200寸进(每次移动相同的距离)下移,每次向下移动,至接触微动开关,触发微动开关,使点胶针头200停止移动,记录此时第三方向的坐标为Z1。[0062]步骤S5,将点胶针头200向上移动一距离H2后,采用寸进方式每次向下移动一距离h,至微动开关,记录此时第三方向坐标为Z2。h<H2<H1。[0063]具体地,通过第三驱动件13将点胶针头...
发布时间:2023.05.15 -
 非标点胶加工出厂价格
非标点胶加工出厂价格[0043]所述检测单元35包括探测器351、镜头352及光源353。所述探测器351设置于固定座31上且朝向所述载玻片34。所述镜头352设置于所述探测器351上。所述光源353设置于所述镜头352上且朝向所述载玻片34。所述探测器351拍摄所述载玻片34承载的胶路及所述基准线集,获得探测信息。所述探测信息为图像。所述处理器用于依据所述图像,检测所述胶路的胶宽;及检测所述胶路与基准线集的距离差。[0044]具体地,所述处理器通过以下方法得到所述胶宽及距离差:[0045]首先,控制所述点胶阀22及移动机构10在载玻片34上形成一段胶路;[0046]然后,控制所述探测器对所述胶路及所...
-
 常规点胶加工厂家价格
常规点胶加工厂家价格[0081]第二方向校正:[0082]步骤S12,将点胶针头200移动至载玻片34上方,并移动点胶针头200的针尖至第二方向坐标Y1处。[0083]具体地,通过移动机构10的***驱动件11、第二驱动件12及第三驱动件13控制点胶针头200在***方向、第二方向及第三方向移动,使点胶针头200的针尖移动至第二方向坐标Y1处,Y1=Y0+2mm,并使点胶针头200的针尖距载玻片34表面的距离为点胶间隙。[0084]步骤S13,沿***方向在载玻片34上点一段第三胶路。[0085]具体地,通过***驱动件11控制点胶针头200在***方向移动,并通过点胶阀22控制点胶针头200进行点胶...
-
镇江非标点胶加工
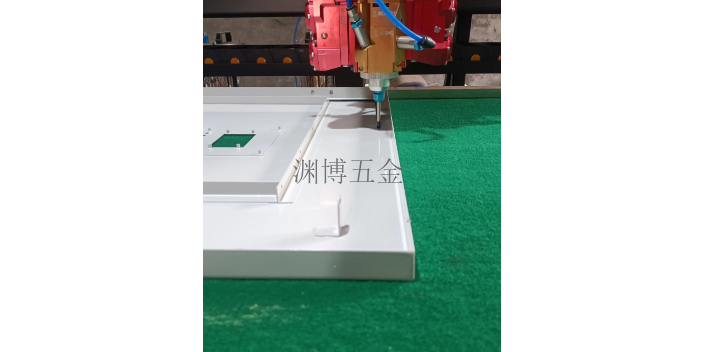
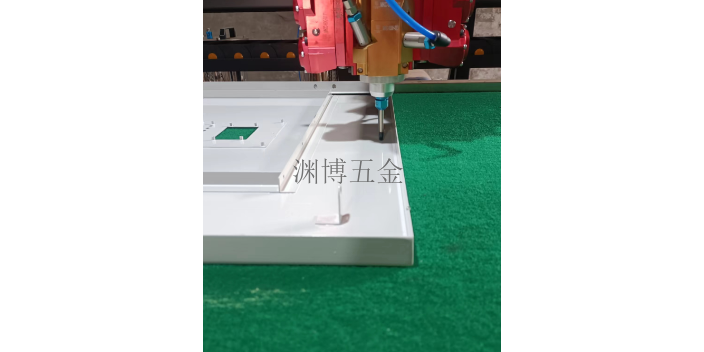
密封胶点胶加工设备可以用在汽车塑胶件配件的防水、防尘密封之中,可以实现汽车配件的防尘防水要求。比如说下图左所示的这个汽车塑胶件工件需要密封点胶加工的部位在工件的底部上沿边缘上,但是密封点胶加工部位上方是有凸起遮挡的,所以就不能垂直进行塑胶件密封胶点胶加工涂胶,需要避开凸起的部位,直接在底部涂胶,使用了自动密封涂胶机涂胶后的成品如下图。密封胶条表面光滑、无接缝、回弹性佳。上图右也是一个汽车配件,这个配件考验的就是密封点胶加工设备的三维涂胶能力了,也就是说塑胶件密封点胶加工要可以二维、三维切换涂胶,使得塑胶件密封点胶加工可以一次性成型。对于汽车配件的一些塑胶件来说,大多数都是在边缘点胶,而...
-
 杭州点胶加工厂家价格
杭州点胶加工厂家价格浪费和培训***值得一提的就是是胶水的浪费,操作员培训以及返工和报废。废液废胶貌似是一点点浪费,但日积月累下来花费不小。减少胶水浪费的一种常见方法是使用一次性点胶部件,类似注射器筒和活塞,其设计为防止点胶后在筒中留下任何胶水。还有一些零件是专门设计为可以减少浪费的结构。储液罐和分配阀之间采用较短的供料管也可以帮助减少浪费。使用特殊的分配阀也可以帮助合理分配胶水,从而将浪费降至比较低。工人培训在任何设备或工艺的应用上一直是难题,点胶当然也不例外,对于复杂的喷射系统和台式机器人来说尤其如此。克服这一问题的一种方法是与点胶设备供应商合作,在供货、测试、调试设备时帮助进行员工培训,并在测试...
-
 温州点胶加工批量定制
温州点胶加工批量定制点胶机点胶加工精度和什么相关呢?知乎用户回答戈埃尔科技1人赞同了该回答1.释放点胶加工压力的大小:由于全自动点胶机在实际点胶加工的过程中需要借助于内部压力降胶水挤出出胶点,进而胶水经点胶加工滴落在电子产品上面相应的部位。如若全自动点胶机内部的压力过大,便可能会一次性挤出过多的胶水致使电子产品上面滴落过多的胶水,而内部压力过小则可能会致使胶水断断续续的滴落到电子产品上面的现象,进而因胶水量过少引发电子产品出现生产缺陷。2.点胶加工时点胶量的大小和胶水的属性:众所周知全自动点胶机作为电子产品制造所***应用的设备所针对的工作对象便是胶水,而不同的胶水制品属性和适合使用的点胶设备也不完全相同...
-
 台州点胶加工哪家好
台州点胶加工哪家好5,并进行|Z1‑Z2|判断。记录重复次数N,若重复次数N大于3时,则发出警报,人工排查。[0069]请参阅图4,***方向校正及胶宽确认:[0070]步骤S7,将点胶针头200移动至载玻片34上方,并移动点胶针头200的针尖至***方向坐标X1处。[0071]具体地,定义载玻片34上的基准线集的中心为原点,并定义过原点的***方向及第二方向坐标为X0及Y0,通过移动机构10的***驱动件11、第二驱动件12及第三驱动件13控制点胶针头200在***方向、第二方向及第三方向移动,使点胶针头200的针尖移动至***方向坐标X1处,X1=X0+2mm,并使点胶针头200的针尖距载玻片3...
-
 扬州点胶加工哪个好
扬州点胶加工哪个好技术领域[0001]本发明涉及一种点胶装置及点胶方法。背景技术[0002]点胶制程中,点胶针的针头容易堵塞,且容易出现撞针现象,经常需要对点胶针进行更换,而在更换点胶针后,需要对点胶针的针头位置进行重新校正,以此保证点胶作业的正常。目前对点胶针的校正处理主要采用三组光纤传感器分别对其进行三个方向的偏差校正,而光纤传感器的校正是间接的,只能确定点胶针的位置,并不能对点胶针的点胶效果进行确认,在实际点胶时还可能出现异常,并且三组光纤传感器成本较高,占用空间大,且校正时间较长。发明内容[0003]鉴于上述状况,有必要提供一种点胶装置及点胶方法,以解决上述问题。[0004]一种点胶装置,用...