新闻中心 - 上海诺尚信息技术有限公司
-
 浙江组成部分电气房轨道巡检机器人
浙江组成部分电气房轨道巡检机器人在机房及继电室内,设备种类繁杂且空间有限,传统巡检方式难以满足实时数据采集与远程监控的需求。室内轮式升降巡检机器人配备高清可见光摄像机和智能图像识别技术,能够自动识别各类仪表盘和油位表,实现数据的即时...
发布时间:2026.04.28 -
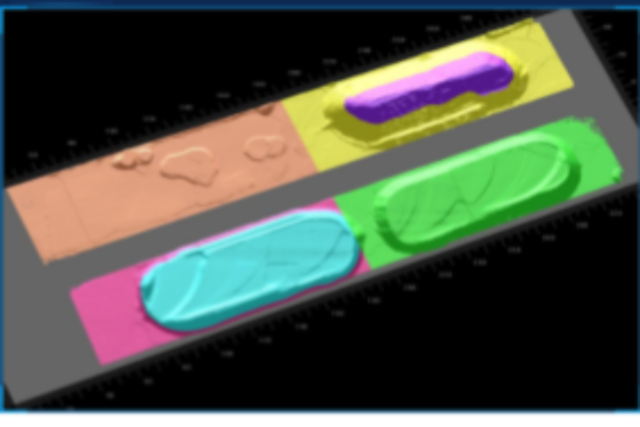
 陕西数字煤场管控系统智能化公司技术
陕西数字煤场管控系统智能化公司技术煤场管理中,老旧设施常面临煤种混合、存储不规范及温度监控不足等难题,影响安全及运营效率。数字煤场管控系统通过划分存煤区域,实现煤堆三维动态展示,精确反映存煤量与状态,优化空间利用。系统集成自动温度监测...
发布时间:2026.04.25 -
 重庆地面轮式巡检机器人全天候
重庆地面轮式巡检机器人全天候输煤廊道的安全保障在煤矿及发电行业中具有明显的实际意义,廊道巡检机器人集成了高清摄像与多传感器融合技术,能够持续监控环境中的温度、声音、粉尘浓度及皮带运行状态等多项指标。一旦检测到异常,系统会自动生成...
发布时间:2026.04.22 -
 北京堆取料机无人值守系统圆形应用效果
北京堆取料机无人值守系统圆形应用效果如何实现无人值守堆取料机系统的安全稳定运行?检测环节是关键所在。该系统配备了多样化的传感设备,包括激光扫描仪、雷达料位检测器、工业视频监控以及定位识别系统,构建了覆盖、监测网络。激光扫描仪通常安装于堆...
发布时间:2026.04.19 -
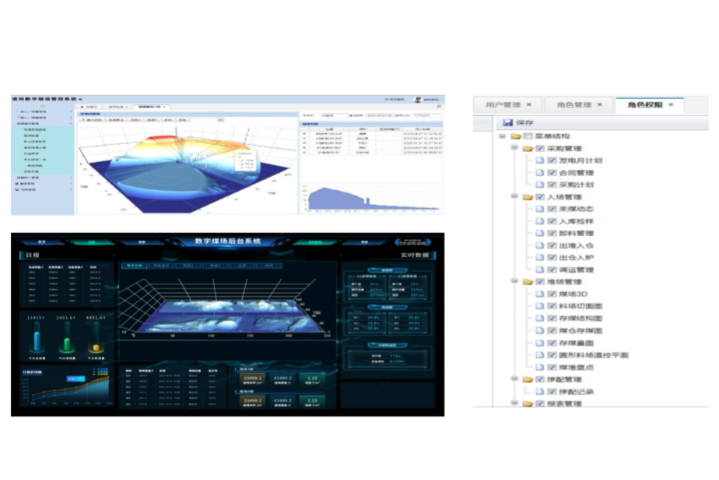 上海数字煤场管控系统一体化的作用
上海数字煤场管控系统一体化的作用挑选适合火电厂的数字煤场管控系统需关注系统功能技术的兼容性以及操作的便捷性。理想的方案应覆盖煤炭进场、消耗及存储的各个环节,确保卸煤登记、煤质核算、用煤计划和盘点管理等流程得到有效支持。技术方面,系统...
发布时间:2026.04.16 -
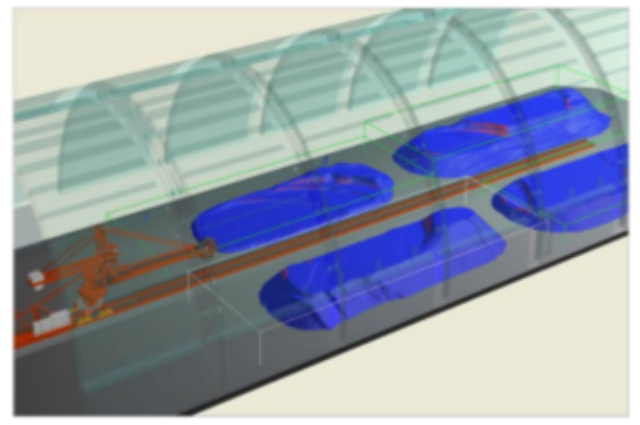
 内蒙古安全巡检机器人局放检测
内蒙古安全巡检机器人局放检测轨道式盘煤巡检机器人设计用于全封闭储煤场,旨在实现料场的实时盘点、温度检测及安全监控,减轻人工巡检压力。该机器人沿煤棚顶部两侧检修马道下方铺设的轨道运行,支持主动和被动两种行走模式,确保巡检路径灵活且...
发布时间:2026.04.13 -
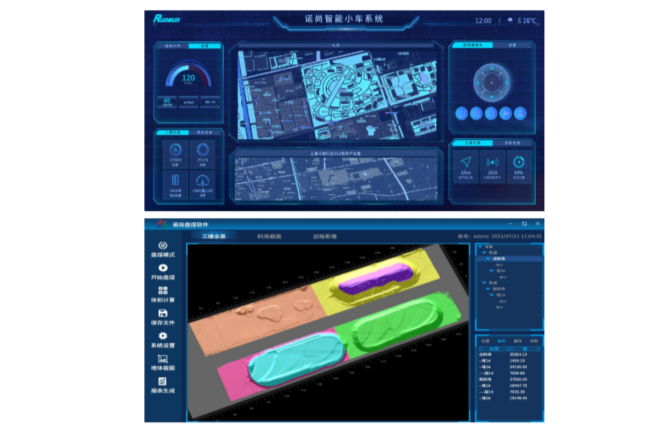
 山东堆取料机无人值守系统刮板防撞开发
山东堆取料机无人值守系统刮板防撞开发设计一体化堆取料机无人值守系统时,需充分考虑料场作业的复杂性和自动化控制的技术要求。系统采用客户端/服务器架构,基于C++语言开发,并利用OpenGL实现三维图形的实时渲染,确保料堆与堆取料机模型的动...
发布时间:2026.04.10 -
 辽宁堆取料机无人值守系统悬臂防撞
辽宁堆取料机无人值守系统悬臂防撞远程控制功能在石化行业的堆取料机无人值守系统中占据重要位置,满足了安全与效率的双重需求。系统依托无线通信网络,实现料场设备与中控室之间的数据实时交互,支持远程视频监控及操作指令的传输。操作人员无需进入...
发布时间:2026.04.07 -
 上海数字煤场管控系统发电集团软件
上海数字煤场管控系统发电集团软件集成平台数字煤场管控系统的安装涉及多个环节,涵盖硬件配置、软件部署及现场调试。安装前,需对煤场环境进行详细勘察,明确煤场布局、煤种分布及设备安装位置,确保整体方案与现场条件相符。随后,传感器、红外温度...
发布时间:2026.04.04 -
 北京地面轮式巡检机器人石化怎么用
北京地面轮式巡检机器人石化怎么用自动巡检地面轮式巡检机器人在工业场站的日常运维中展现出较高的自主性和适应性,特别适合电力、石化及煤矿等领域的复杂环境。其主要功能在于实现无人值守的持续巡检,自动采集多种关键数据,包括设备外观、表计读数...
发布时间:2026.04.01 -
 山东智能巡检系统大数据分析多少钱
山东智能巡检系统大数据分析多少钱安防领域对巡检机器人的技术参数有明确要求,以适应全天候和复杂环境下的监控任务。诺尚地面轮式巡检机器人在参数设计方面体现出较强的适应性和专业性。其定位系统采用3D激光导航传感器,能够构建高精度三维场站地...
发布时间:2026.03.29 -
 天津堆取料机无人值守系统激光扫描
天津堆取料机无人值守系统激光扫描在堆取料机无人值守系统的技术开发中,重点集中于实现自动堆取作业的智能化控制,融合激光扫描、视频监控、定位识址及PLC控制等多种技术要素。系统选用格雷母线定位方案,依托电子编码器、电磁发射器及读码器的协...
发布时间:2026.03.26