新闻中心 - 上海诺尚信息技术有限公司
-
 山西工业安全监测系统工矿企业安装流程
山西工业安全监测系统工矿企业安装流程挡煤墙温度监测系统是保障煤场安全的重要组成部分,通过温度传感器和测温模块的结合,该系统能够实时监测挡煤墙的温度变化,预防因温度异常引发的火灾事故。系统采用工业通用标准MODBUS-RTU协议,方便与各...
发布时间:2026.07.18 -
 山东室内轮式升降巡检机器人智能充电的组成
山东室内轮式升降巡检机器人智能充电的组成机房内设备多样且运行状态复杂,传统人工巡检存在效率和安全方面的挑战。机房室内轮式升降巡检机器人集成多项智能功能,旨在提升巡检效率与准确度。机器人配备红外热像测温功能,能够监测关键设备的温度变化并发出报...
发布时间:2026.07.15 -
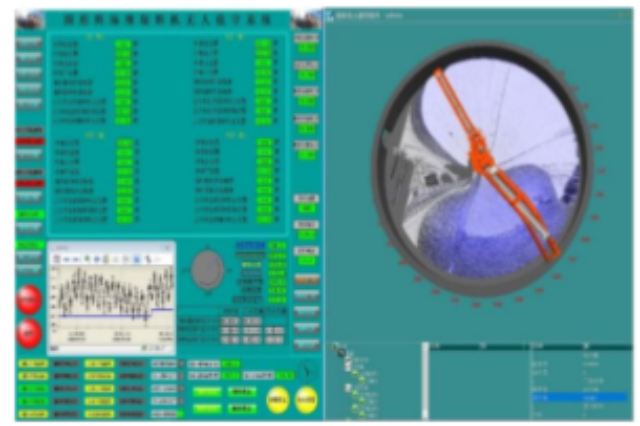
 河北堆取料机无人值守系统高精度视频监控远程控制
河北堆取料机无人值守系统高精度视频监控远程控制远程控制是无人值守堆取料系统的重要功能,允许操作人员在输料综合楼内通过远程操作台对设备进行自动或半自动管理。系统通过无线和光纤通信网络实现数据的实时传输,保证指令响应及时且视频监控稳定。远程操作界面集...
发布时间:2026.07.12 -
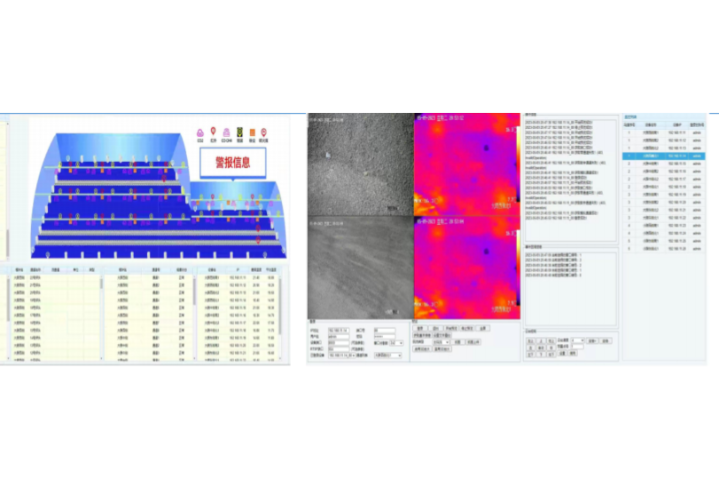 山东工业安全监测系统明火识别远程通信
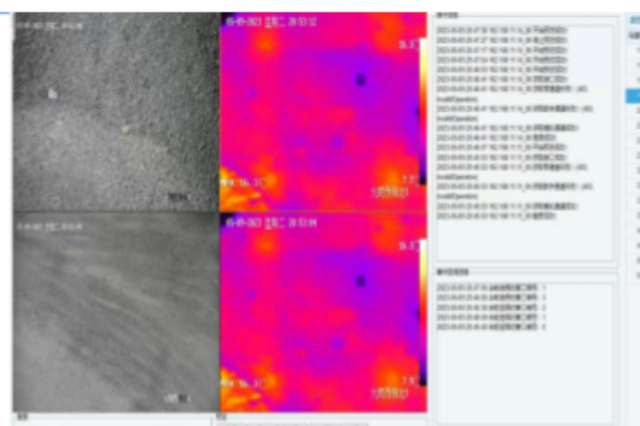
山东工业安全监测系统明火识别远程通信在复杂的工业环境中,温度的实时监测和精确定位是保障安全生产的重要环节。红外温度工业安全监测系统通过红外热成像技术,能够实时捕捉设备和环境的温度变化,并进行精确定位报警。该系统的优势在于其能够对监测区域...
发布时间:2026.07.09 -
 广东实时监测智能巡检系统
广东实时监测智能巡检系统廊道巡检机器人在功能设计中,实时数据交互占据重要地位,促使机器人与监控中心保持持续双向通信,增强巡检的智能化水平。机器人配备多种传感器,持续监测输煤廊道的温度、粉尘浓度及异常声响,同时利用高清摄像头记...
发布时间:2026.07.06 -
 北京工业安全监测系统煤炭转运的优点
北京工业安全监测系统煤炭转运的优点粉尘和扬尘问题在工矿企业中是一个常见的挑战,不*影响环境,还可能对员工的健康产生不利影响。粉尘扬尘工业安全监测系统实时监测提供了一种有效的解决方案,通过先进的光散射技术,能够快速准确地检测空气中的粉尘...
发布时间:2026.07.03 -
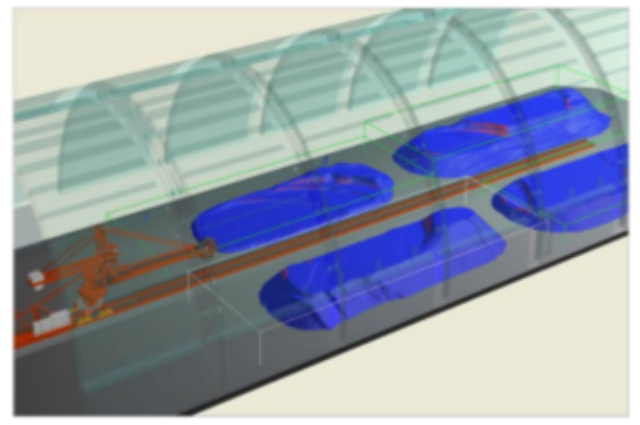
江苏工业安全监测系统圆形料场实时数据采集
在燃煤电厂的安全管理体系中,工业安全监测系统的部署为风险预警和事故防控提供了有效的技术保障,切实提升了生产过程的本质安全水平。安装流程通常从现场勘察开始,技术人员需要评估电厂的具体环境条件和安全需求,...
发布时间:2026.06.30 -
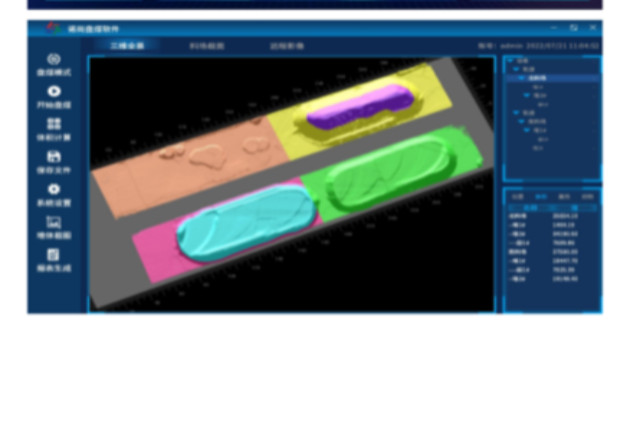
 上海堆取料机无人值守系统条形仿真处理
上海堆取料机无人值守系统条形仿真处理堆取料机无人值守系统的控制台设计直接影响操作人员的使用体验和作业安全。该控制台一般设置在输料综合楼内,配备操纵杆、按钮和选择开关等多种操作装置,支持远程实时控制堆料和取料机的各项动作。通过控制台,操作...
发布时间:2026.06.27 -
上海工业安全监测系统一体化怎么样
在现代工业环境中,安全监测成为不可或缺的一环。尤其是在煤矿和燃煤电厂等高风险场所,远程诊断工业安全监测系统的应用显得尤为重要。想象一下,一个煤矿工人在工作时,突然闻到一股异味,他立刻意识到可能存在有毒...
发布时间:2026.06.24 -
 河南工业安全监测系统粉尘扬尘性价比
河南工业安全监测系统粉尘扬尘性价比在现代工业环境中,安全监测成为不可或缺的一环。尤其是在煤矿和燃煤电厂等高风险场所,远程诊断工业安全监测系统的应用显得尤为重要。想象一下,一个煤矿工人在工作时,突然闻到一股异味,他立刻意识到可能存在有毒...
发布时间:2026.06.21 -
 远程诊断工业安全监测系统
远程诊断工业安全监测系统斗轮机工业安全监测系统的工作原理是基于先进的传感器技术和数据分析能力,旨在确保大型料场和发电集团的安全运行。斗轮机是煤矿和燃煤电厂中重要的设备,其运行状态直接影响到生产效率和安全性。监测系统通过传感器...
发布时间:2026.06.18 -
 河北数字煤场管控系统云端协同安装流程
河北数字煤场管控系统云端协同安装流程煤场管理中,数字化管控系统逐渐成为提升管理效率和安全保障的关键工具。系统通过多维数据采集,实现煤堆温度、体积及存放区域的实时监测,辅助制定科学的取煤计划,优化资源配置。管理流程涵盖进煤、耗煤和存煤环节...
发布时间:2026.06.15