商机详情 -
山西Ai防撞传感器方案设计
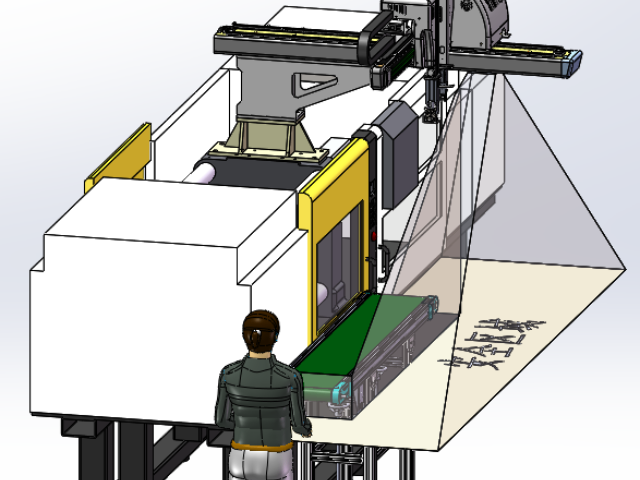
桁架机器人在自动化加工单元中承担工件上下料任务。机器人的横梁和立柱构成框架结构,移动部件沿轨道运行。立体空间防护传感器用于检测移动部件运行轨迹上的障碍物。在机器人高速移动时,如果轨道末端有人员站立或料架位置偏移,传感器能够在碰撞发生前检测到异常。传感器的工作方式包含主动探测和被动接收两种模式。主动模式发射红外或激光脉冲,根据反射时间计算距离。被动模式接收目标发出的红外辐射,用于检测人员存在。两种模式可根据环境光照条件切换。在夜间或低照度车间,主动模式保持正常工作。在白天或强光照射区域,被动模式的灵敏度适当降低以避免误触发。传感器的输出信号直接连接到桁架机器人的安全继电器。安全继电器切断动力电源时,设备所有运动轴同时制动。安装支架设计为可调节角度,使传感器波束覆盖需要监测的区域。维护人员每月检查一次安装螺栓是否松动。3D立体空间防护传感器,毫秒级响应,构筑工业安全电子围墙。山西Ai防撞传感器方案设计
传感器
立体空间防护传感器在轮胎成型机鼓架区域用于检测操作人员手部位置。轮胎成型过程中,成型鼓高速旋转,操作人员需要将橡胶层贴附在鼓面上。传感器安装在成型鼓上方斜向45度角照射。传感器检测手部与成型鼓之间的直线距离。手部距离鼓面小于100毫米时,成型鼓转速从每分钟300转降至每分钟60转。手部距离鼓面小于30毫米时,成型鼓停止旋转,同时制动器动作使鼓面在1秒内静止。手部移开后,成型鼓自动恢复到设定转速。传感器对人手与橡胶材料的区别有良好的识别能力。人手皮肤的红外反射率与橡胶材料不同,传感器通过回波强度进行区分。当传感器检测到橡胶材料靠近鼓面时不触发减速,只有人手靠近时才触发。操作人员不需要穿戴特殊手套或标记物。传感器的探测波束宽度较窄,在500毫米距离处光斑直径约为30毫米。窄波束能够精确指向操作区域,避免检测到不必要的周边物体。安装时使用激光笔辅助对准,将光斑中心对准成型鼓边缘位置。传感器的面板上有动作指示灯,检测到目标时指示灯点亮,操作人员可以直观确认传感器工作状态。供电采用24伏直流电压,消耗电流为80毫安。四川机器人防护防撞传感器技术指导食品加工行业适用,IP65防护等级可承受定期水洗清洁。
很多企业在引入智能安全设备时,比较大的顾虑就是调试复杂、维护困难。大德恒通防撞传感器配套“DDH智能防护系统1.0”上位机软件,界面清晰、操作直观。用户只需通过以太网连接传感器,即可在电脑上实时查看检测画面,并用鼠标直接在图像上绘制防护区域——支持矩形、圆形、多边形等多种形状,区域大小、位置、数量均可自由设定。每个检测区域还可**调节灵敏度,自由匹配I/O开关量输出。一套传感器可存储多个防护场景,适应同一设备在不同工位、不同工序下的安全需求,一键切换即可完成防护方案调整。这种“所见即所得”的调试方式,大幅降低了使用门槛,普通电气工程师或设备管理员经过简单培训即可**完成设置,真正实现了防撞传感器的易用性与普及性。
注塑车间机械手从模具中取出注塑件后,需要将注塑件放入输送带或料箱。立体空间防护传感器安装在机械手夹具的侧面,检测注塑件是否在夹具上脱落。机械手开模后进入模具内部取件,夹具闭合夹住注塑件。在机械手退出模具的过程中,传感器持续监测夹具与注塑件之间的相对位置。注塑件从夹具上滑落时,传感器探测到的距离突然增大。控制系统收到距离变化信号后,停止机械手后续动作。机械手保持当前姿态等待人工处理。这种检测避免了空夹具继续进行放置动作,防止后续工序出现空料情况。传感器也能检测模具内是否有残留的注塑件。机械手取件完成后,传感器在模具闭合前快速扫描模具型腔。型腔内若有残留物,反射信号特征与空腔不同,传感器输出禁止合模信号。注塑机顶针保持顶出状态,等待操作人员清理。传感器的响应时间设定为10毫秒,与机械手动作速度匹配。安装时传感器探头与夹具边缘保持齐平,避免探头被工件碰撞。从“要我安全”到“我要安全”,防撞传感器用技术改变意识。
很多企业的安全管理停留在“制度上墙、口号喊响”的阶段,操作人员对安全的重视程度往往随着时间推移而下降。防撞传感器的引入,从技术层面改变了这一局面。当设备本身具备了“主动防撞”的能力,人员在疲劳、分心或侥幸心理下出现的不规范操作,会立即被传感器识别并触发设备停机与声光报警。这种即时的、不可回避的反馈,比任何培训都更能强化人员的安全意识。安装防撞传感器后,不少企业反馈:员工会主动关注传感器状态,自觉避开危险区域,安全习惯明显改善。这正是技术驱动安全文化的典型案例——用设备的力量,让“我要安全”成为每个人的本能反应。高算力AI芯片内置,无需额外购买工控机或边缘盒子!河北立体防护传感器灵活检测
安装方式灵活,正上方或侧上方倾斜20°-55°均可稳定工作。山西Ai防撞传感器方案设计
自动化龙门铣床加工大型工件时,龙门框架移动速度较慢但惯性较大。立体空间防护传感器安装在龙门两侧的立柱上,向前后两个方向发射探测波束。当操作人员在龙门行程范围内进行测量或检查时,传感器持续监测人员位置。传感器内部将空间划分为三个区域,每个区域对应不同的设备响应。**外层区域为警告区,人员进入时控制室内蜂鸣器发出间断响声。中间区域为减速区,人员进入时龙门进给速度从每分钟2米降至每分钟0.5米。**内层区域为停止区,人员进入时龙门驱动电机抱闸吸合,运动完全停止。区域边界的距离值通过传感器面板上的按键设定。操作人员根据现场实际情况将停止区边界设置在夹具边缘向外300毫米处。传感器的检测精度在满量程范围内保持一致性。测量距离为5米时误差不超过正负25毫米。安装时使用水平仪校准传感器支架,确保波束轴线与地面平行。接线使用快速插拔接头,更换传感器时不需要重新剥线。山西Ai防撞传感器方案设计
深圳市大德恒通科技有限公司是一家有着雄厚实力背景、信誉可靠、励精图治、展望未来、有梦想有目标,有组织有体系的公司,坚持于带领员工在未来的道路上大放光明,携手共画蓝图,在广东省等地区的机械及行业设备行业中积累了大批忠诚的客户粉丝源,也收获了良好的用户口碑,为公司的发展奠定的良好的行业基础,也希望未来公司能成为*****,努力为行业领域的发展奉献出自己的一份力量,我们相信精益求精的工作态度和不断的完善创新理念以及自强不息,斗志昂扬的的企业精神将**深圳市大德恒通科技供应和您一起携手步入辉煌,共创佳绩,一直以来,公司贯彻执行科学管理、创新发展、诚实守信的方针,员工精诚努力,协同奋取,以品质、服务来赢得市场,我们一直在路上!