商机详情 -
福建城市巡检机器人价格
巡检机器人的远程操控中心利用先进的无线通信技术,与控制软件无缝对接,实现了与机器人本地监控平台的实时信息交互。通过这一系统,不仅能够远程操控巡检机器人的行动,还能在操控中心的显示屏上直接查看机器人采集的高清视频和各类数据信息。远程操控中心宛如机器人的“智能中心”,不仅发出行动指令,还负责解析机器人传回的视觉、音频等感知信息。一旦发现设备异常,巡检机器人和远程操控中心会同时发出声光报警,迅速通知用户进行检查维修,确保问题得到及时解决。此外,远程操控中心还具备强大的数据管理功能,能够实时记录报警信息,形成历史数据库。用户可根据日期或设备类型轻松查询设备状态和存档图片,为设备的长期维护和管理提供了有力的支持。巡检机器人关注振槽连杆摆动,数据分析预测,提升车间管理智能度。福建城市巡检机器人价格

电磁导航/射频识别(RFID)组合导航:在地面上铺设磁轨道,包含多条引导电缆,每条电缆流经不同频率的电流。机器人通过感应线圈检测电流来感应路径信息,实现移动路线的定位。在需要停止巡检的位置预埋RFID,实现精细定位。优点:精细定位,抗干扰能力强。缺点:需要预铺磁轨道,不能预测道路变化趋势及不能高速运行。激光导航:利用视觉传感器拍摄路面图像,通过图像识别技术提取具有特征的点作为路标。计算各路标在全局坐标系下的坐标值,为激光导航提供依据。优点:可以实现较高精度的导航和定位。湖北室外巡检机器人施工方案智能化巡检,设备健康一目了然。
巡检机器人在石油储罐的液位监测方面,拥有装载不同传感器的能力以进行精确检测。以下是几种可能的实现方式:激光测距传感器:巡检机器人可以配备激光测距传感器来监测石油储罐的液位。这种传感器通过发射激光束并接收其反射回来的信号,来测量液位与传感器之间的距离。激光束在空气中传播的速度是恒定的,因此通过计算激光从发射到接收的时间差,可以准确计算出液位的高度。压力传感器:另一种方法是使用压力传感器。通过在石油储罐底部安装压力传感器,机器人可以间接测量液位。随着液位的上升,储罐底部的压力也会相应增加。通过监测这种压力变化,并结合储罐的形状和尺寸,可以推算出液位的高度。红外液位传感器:巡检机器人也可以配备红外液位传感器来进行液位检测。这种传感器利用红外线的特性,通过发射红外光并接收其反射回来的信号,来测量液位。红外光在液体和空气之间的反射特性不同,因此可以通过分析反射信号来确定液位的位置。这些方法各有优势,可以根据具体的应用场景和需求选择合适的传感器进行液位监测,确保石油储罐的安全和稳定运行。
安保室外巡检机器人凭借其多样化的功能和性能,在多个领域发挥着重要作用。以下是关于安保室外巡检机器人在智慧园区、地下管廊、工业厂区、大型建筑施工现场等应用领域地下管廊设备运行状态识别:机器人可以实时监测管廊内的各类设备(如电气设备、通风设备、消防设备等)的运行状态,及时发现设备故障并进行处理。环境监测:能够精确检测管廊内的温度、湿度、气压以及有害气体浓度等环境参数,确保管廊的安全运行。智能报警:在发现异常情况时,如设备故障、气体泄漏等,机器人能够及时发出声光报警信号,通知相关人员进行处理。冶金设备隐患排查机器人,实时监控,确保生产安全无事故。
巡检机器人行业商业模式分析在巡检机器人行业中,“本体生产+系统集成”模式是当下的发展趋势,也是当前具备较高盈利水平的商业模式。这种商业模式要求企业不仅具备机器人本体的生产能力,还需要具备系统集成的能力,能够根据客户的需求进行定制化开发,提供完整的解决方案。目前国内外较为成功的企业都采用了“本体生产+系统集成”的全产业链模式,或是正在向上下游逐步渗透,实现全产业链模式的转型。这种模式的优势在于可以整合上下游资源,提高产业链的协同效应,降低成本,提高竞争力。同时,企业还可以根据市场需求和技术发展趋势,不断调整和优化产业链布局,实现可持续发展。在“本体生产+系统集成”模式中,企业可以通过技术创新和品牌建设,提高产品的附加值和竞争力。同时,企业还可以加强与其他企业的合作,共同开发新产品,拓展新市场,实现共赢发展。总之,“本体生产+系统集成”模式是巡检机器人行业未来的发展趋势,具备较高的盈利水平和市场潜力。对于企业来说,应该加强技术研发和品牌建设,积极拓展市场,实现可持续发展。陈酿勾兑巡检机器人,精细管理流程,推动酿酒智能化发展。湖南智能机器巡检机器人工程
酿酒原料运输巡检机器人,自动化操作,提高生产效率与质量。福建城市巡检机器人价格
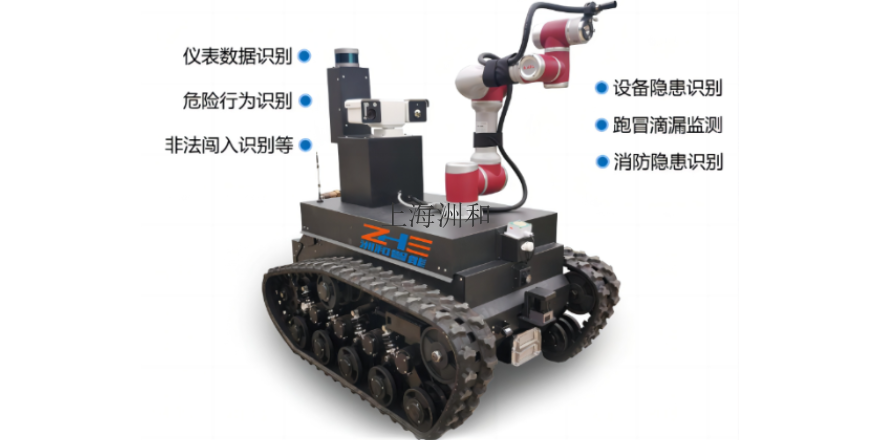
防爆轮式巡检机器人在石化领域的功能与特点分析一、图像识别功能在石化领域的巡检工作中,防爆轮式巡检机器人凭借其独特的图像识别功能,提升了巡检的效率和准确性。该功能主要包括以下几个方面:目标观测点预置:巡检目标,如压力表、温度表、流量计、球阀、截止阀和蝶阀等,都经过预先标定,并设置为云台的预置点。这样,当机器人通过导航及RFID定位运行到检测位后,可以自动调用云台进行拍照,确保每次都能准确捕获目标图像。自动拍照与图像传输:到达预置点后,机器人会自动拍照,并将目标图像传送到远程工作站。这一过程中,机器人可以确保图像的稳定性和清晰度,为后续的图像识别提供可靠的数据支持。图像识别与信息提取:在远程工作站,通过先进的图像处理技术,可以自动识别并提取图像中的关键信息。这些信息包括阀门开度、仪表指针读数以及阀门有无泄露等。通过对比历史数据和预设的安全阈值,可以及时发现异常情况,并采取相应的处理措施。福建城市巡检机器人价格