商机详情 -
杭州ROS全源融合时空智能敏捷开发平台作用
平台在时空数据关联分析方面的能力,帮助用户挖掘数据背后的深层价值。时空数据往往不是孤立存在的,不同类型的时空数据之间存在隐藏的关联关系,全源融合时空智能敏捷开发平台具备强大的时空数据关联分析功能,可通过多维度数据关联、时空叠加分析等技术,挖掘数据间的潜在联系。例如,在城市管理中,平台可将城市 crime 数据与路灯分布数据、摄像头分布数据、人口密度数据进行关联分析,发现 crime 发生率与基础设施分布、人口流动的关联规律,为城市安全设施布局优化提供依据;在房地产领域,应用可通过平台关联房产价格数据、周边学校质量数据、交通便利性数据、商业配套数据,分析影响房价的关键时空因素,为购房者与房产企业提供数据参考。基于全源融合时空智能敏捷开发平台,开发了自然灾害预警系统。杭州ROS全源融合时空智能敏捷开发平台作用

全源融合时空智能敏捷开发平台的版本更新与技术迭代机制,确保平台始终紧跟行业技术发展趋势。时空智能技术领域发展迅速,新的数据源类型、数据处理算法、开发框架不断涌现,平台团队会定期收集用户反馈与行业技术动态,对平台进行版本更新与功能优化。在更新过程中,平台采用平滑升级机制,确保用户现有应用与数据不受影响,开发者无需重新开发即可享受新功能。例如,当行业出现新的时空数据格式时,平台会在新版本中新增对该格式的支持,开发者可直接导入使用;当新的时空分析算法(如更精确的轨迹预测算法)问世后,平台会将其集成到分析模型库中,开发者可直接调用提升应用性能。这种持续迭代的机制,让平台能够不断满足用户日益增长的需求,保持技术优先性。江苏低功耗全源融合时空智能敏捷开发平台定制全源融合时空智能敏捷开发平台为金融风控提供了时空行为分析能力。
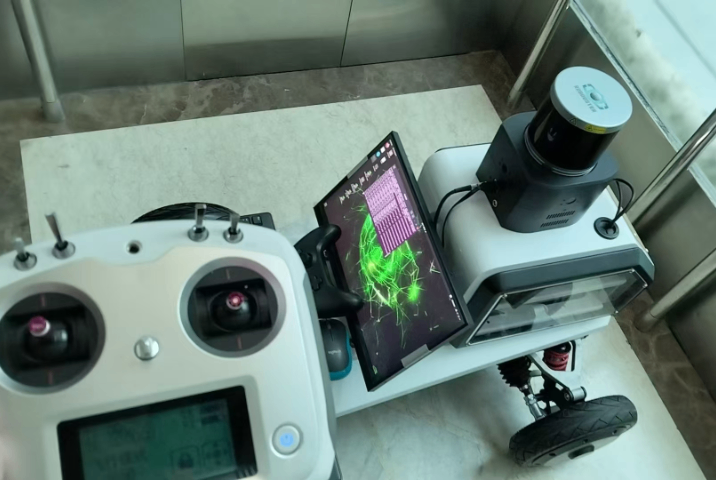
针对SLAM研究与自动驾驶研发的痛点,全源融合时空智能开发平台S1系列提供了一体化解决方案,为科研与产业应用铺平道路。该系列平台基于NVIDIA Jetson Orin NX算力平台,一体化集成多线激光雷达、深度相机、双天线GNSS RTK及IMU等多类传感器,无需额外组装,解决了传统研发中硬件集成复杂的难题。采用基于1PPS的硬件级同步机制,实现传感器间微秒级同步,从根本上消除时间漂移,确保多源感知数据时空对齐。平台支持标准ROS话题输出,与LIO-SAM、VINS-Mono等主流SLAM框架无缝对接,预置算法镜像,实现即插即用,让研究者从底层驱动开发中解放出来,专注于算法创新与科研突破。
平台在乡村振兴领域的应用,为农村信息化建设与产业发展注入新动力。乡村振兴离不开时空数据的支撑,如农村土地资源分布、农业产业布局、乡村基础设施位置、农村人口流动等,平台可整合乡村相关的多源时空数据,包括农村遥感影像、土地确权数据、农业生产数据、乡村道路与水利设施数据、农村电商物流数据等,构建乡村时空数据底座。基于该底座,开发者可开发多种乡村应用:在农村土地管理方面,应用可通过平台清晰呈现土地权属、用途分布,辅助开展土地流转与集约化利用;在乡村产业发展方面,应用能结合农产品种植数据与市场需求数据,为农民提供种植品种推荐与销售渠道对接,推动农产品产销对接;在乡村基础设施建设方面,应用可整合乡村道路、供水供电设施的时空数据,优化设施布局与维护计划,提升农村基础设施服务水平,助力实现农业强、农村美、农民富的目标。如何将AI算法集成到全源融合时空智能敏捷开发平台?

中德睿博Robooster推出的全源融合时空智能敏捷开发平台S1系列,不仅适合高校实验室、科研机构,也适合自动驾驶、机器人公司的研发团队,更可作为SLAM学习者的理想实验平台:研究方向:●多传感器融合SLAM算法:开发与验证激光-视觉-IMU-GNSS融合的SLAM系统。●动态环境SLAM:利用多源数据识别、定位或消除行人、车辆等动态物体。●大规模三维建图:构建厘米级精度的室内外一体化地图。●全源导航定位系统:研究GNSS拒止环境下的稳定、连续、高精度定位。通过全源融合时空智能敏捷开发平台,实现了复杂业务流程的自动化。长沙机器人全源融合时空智能敏捷开发平台二次开发
如何基于全源融合时空智能敏捷开发平台构建智慧园区综合管理系统?杭州ROS全源融合时空智能敏捷开发平台作用
还在为多传感器集成、标定与同步耗费大量研发精力?全源融合时空智能开发平台 S1 系列,专为高效研发而生。平台一体化集成多线激光雷达、深度相机、双天线 GNSS-RTK 及 10 轴 IMU,一站配齐所有感知硬件,无需额外组装。所有数据以标准 ROS 话题输出,与 LIO-SAM、VINS-Mono 等主流 SLAM 框架无缝对接,真正实现即插即用。预置主流算法 Docker 镜像,一键运行对比测试,大幅缩短算法验证周期。从硬件到软件,从数据到接口,全链路优化,让研发团队将 80% 精力投入核心算法,研发效率倍增,加速前沿技术从实验室走向产业化落地。杭州ROS全源融合时空智能敏捷开发平台作用