商机详情 -
苏州移动机器人3D相机识别
矿山井下作业领域已实现全流程数字化管控,其重要方案集成3D激光雷达扫描、3D ToF技术、SLAM同步定位与建图及AI安全分析技术,实现“井下采集-实时建模-隐患监测-准确管控”的闭环管理。井下作业人员携带轻量化3D激光雷达ToF扫描仪,适配无GPS、弱光线的复杂环境,沿巷道行走即可完成数据采集,借助ToF技术的抗干扰优势,5-10分钟可覆盖单条巷道,同步获取高精度点云与实景影像,还原巷道支护、管线走向等细节。系统自动生成井下三维数字孪生模型,通过AI分析点云数据,准确识别巷道变形、采空区隐患,支持多维度查看与方量准确计算,误差可控制在1%以内,形成完整数字化作业档案,提升井下作业效率与安全管控水平,降低人工勘查的安全风险。杭州星火博特3D视觉相机提供经济高效的感知方案,在保证检测精度的同时,降低水下检测成本,替代传统。苏州移动机器人3D相机识别

场景:火灾现场、地震废墟,存在燃烧物、倒塌墙体、碎石、积水等障碍物,光线昏暗、烟雾浓厚,环境复杂且危险,需进入现场探查、救援,避免碰撞危险物体。技术说明:配备sparkbot 3D激光雷达与3D ToF相机,融合3D ToF与dToF数据,突破单一传感器在烟雾、昏暗环境下的局限,实现远距离倒塌墙体、燃烧物的高精度探测与近距离碎石、积水的广域覆盖。融合多源传感器数据,精确识别障碍物类别、地面安全性及可通行区域,构建灾害现场三维环境模型,优化系统延迟,应对墙体二次坍塌、火焰蔓延等动态场景,智能适应昏暗、烟雾环境与复杂地形,保障救援机器人安全进入现场,辅助消防救援。上海双目3D相机建图会展中心闸机:3D相机实时统计入场人数,检测异常聚集,保障展会有序进行。
3D ToF技术作为数字孪生的重要感知支撑,随着技术融合与产业需求升级,未来应用前景广阔,将从多维度推动数字孪生落地深化,赋能千行百业数字化转型。 技术层面,多ToF融合技术将成为主流,通过多相机部署实现全视角、无盲区空间感知,结合SLAM算法提升建模精度与 robustness,同时与AI、5G、边缘计算深度融合,进一步降低建模成本、缩短周期,实现虚实场景毫秒级同步。 场景层面,应用将从现有重要领域向多行业延伸。工业领域将实现全流程覆盖,助力企业构建全工厂级孪生系统;自动驾驶领域将支撑更复杂长尾场景仿真,加速技术落地;同时拓展至智慧城市、智慧能源、机器人导航等领域,承担场景复刻与实时感知重要角色。 产业层面,随着数字孪生规模化落地,3D ToF将迎来规模化应用,平台化发展将降低中小企业应用门槛,其与生成式AI的协同,将进一步释放虚实融合价值,成为空间数字化与数字孪生深度发展的重要支撑,前景可期。
3D ToF相机技术(激光雷达/LiDAR)是无人机三维感知的重要底层技术,以±2cm测距精度、毫米级点云分辨率,赋予无人机高效准确的空间建模能力,为国土规划、农业、应急等领域提供高精度地理空间数据,助力行业智能化升级。国土规划中,搭载该技术的无人机可快速扫描地形,生成5cm精度三维模型,清晰呈现地形、建筑分布,规避人工测绘盲区,为土地整备、城市设计提供准确依据,提升规划效率。农业领域,无人机凭借±3cm地表探测精度,准确捕捉农田地形、作物冠层数据,支撑灌溉规划、长势监测与产量估算,推动农业精细化发展。应急场景下,其可突破复杂环境限制,快速生成厘米级灾害现场模型,准确定位被困人员、排查隐患,为灾害处置和救援规划提供高效数据支持。3D相机可应用于机场航站楼区域安防,应对人员密集、场景复杂的安防需求。

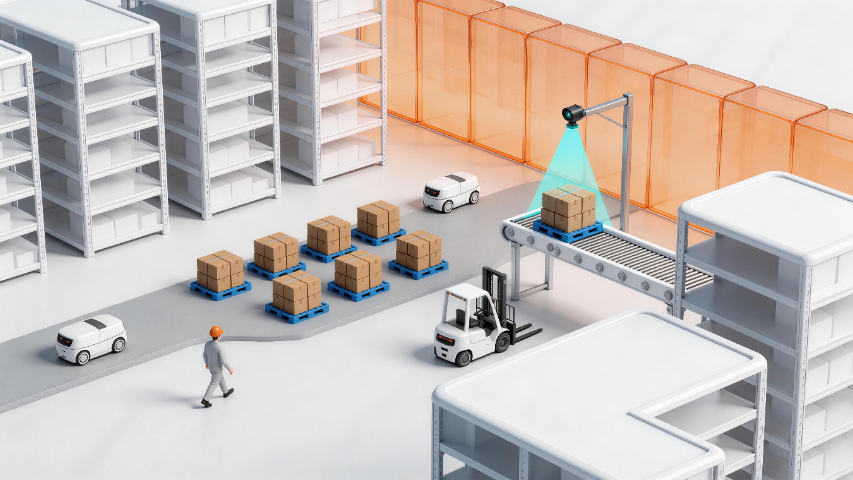
3D视觉体积测量系统组成及应用场景:杭州星火博特3D视觉体积测量解决方案由高性能3D视觉相机、先进体积测量算法和灵活软件平台组成,保障测量精细高效。3D相机内置算力,无需依赖外部CPU即可运行,提升测量速度与精度;3D体积检测软件实时处理三维数据,生成精确长宽高及体积结果并反馈给上层控制系统;即时反馈系统可快速上报检测结果,助力上层自动化决策。该方案广泛应用于物流仓储、制造业等领域,助力企业优化库存、提升效率,减少人工误差与成本。体积测量系统部署注意事项:环境要求:尽管设备具备良好的动态适应性,但在粉尘严重、油污过多或水雾较重的场景中,光学成像可能会受到影响。建议确保测量环境清洁,并保证3D视觉相机的支架具有足够的刚性和稳定性。适用物体类型:该解决方案适用于物流输送线料框、转运托盘和大型货物等复杂形态物体,尤其适合需要高精度体积测量的工业物流仓储场景。 无人搬运机器人通过该雷达绕障,在车间内灵活搬运工件,规避生产设备与人员。重庆双目3D相机模组
sparkbot的3D 视觉定位解决方案,将ToF、dToF和激光雷达数据深度融合,构建高精度、抗。苏州移动机器人3D相机识别
半球形3D激光雷达 6 足机器狗结合,其行业价值得到多维释放。在工业巡检领域,机器狗凭借 360° 立体感知能力,可在核电站、化工厂等高危环境中自主规避管道、线缆等细小障碍物,10cm 小盲区甚至能识别地面螺栓等隐患,大幅降低人工巡检风险。在抢险救灾场景,抗强光与宽视场角的组合,让机器狗在废墟阴影与露天区域间灵活穿梭,快速绘制现场三维地图,为救援决策提供精确数据。而在室内服务领域,主动抗串扰技术支持多台机器狗协同作业,配合 3D 建图能力,无需改造环境即可快速部署,极大提升商场、医院等场所的运维效率。从技术突破到场景落地,半球形3D激光雷达达不*可让6 足机器狗的 “感知神经” 更敏锐,更推动移动机器人从 “功能执行” 向 “智能决策” 跨越。在空间智能感知的新时代,这种硬件与算法的深度协同,正为各行业的自动化升级注入全新动能。苏州移动机器人3D相机识别
杭州星火博特科技有限公司在同行业领域中,一直处在一个不断锐意进取,不断制造创新的市场高度。多年以来致力于发展富有创新价值理念的产品标准,在浙江省等地区的电子传感器领域中始终保持良好的商业口碑。成绩让我们喜悦,但不会让我们止步,残酷的市场磨炼了我们坚强不屈的意志,和谐温馨的工作环境,富有营养的公司土壤滋养着我们不断开拓创新,勇于进取的无限潜力。杭州星火博特科技供应携手大家一起走向共同辉煌的未来,回首过去,我们不会因为取得了一点点成绩而沾沾自喜,相反的是面对竞争越来越激烈的市场氛围,我们更要明确自己的不足,做好迎接新挑战的准备,要不畏困难,激流勇进,以一个更崭新的精神面貌迎接大家,共同走向辉煌回来!