商机详情 -
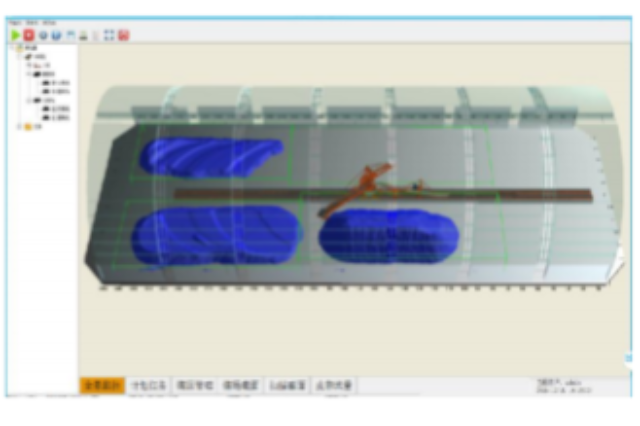
河南堆取料机无人值守系统3D建模图像
在堆取料机无人值守系统的技术开发中,重点集中于实现自动堆取作业的智能化控制,融合激光扫描、视频监控、定位识址及PLC控制等多种技术要素。系统选用格雷母线定位方案,依托电子编码器、电磁发射器及读码器的协同作用,实时采集堆取料机的位置信息。激光扫描技术则对料堆进行动态捕捉,生成三维图像及料堆信息库,为堆取作业提供空间数据支撑。软件采用C/S架构设计,基于C++语言结合OpenGL图形库,实现三维图像的高效绘制和实时更新。系统通过TCP/IP Socket实现与激光设备的数据通信,串口服务器连接GPS和角度位移编码器,保障数据传输的稳定性。ActiveX技术的应用提升了三维绘制功能的封装性和调用便利性。数据经过归一化处理,并采用自定义数据地图模式,有效分类扫描数据,减轻计算负担。系统构建于工业自动化网络之上,实现感知层、数据传输处理层与用户控制层的协调运作,支持多模式操作,满足多样化作业需求。上海诺尚信息技术有限公司结合技术积累与开发经验,致力于为煤矿及电力行业客户提供稳定且高效的无人值守堆取料系统,推动生产管理的智能化发展。远程监控功能让堆取料机无人值守系统操作人员轻松管理多个料场,提升整体运营效率。河南堆取料机无人值守系统3D建模图像
煤矿生产中堆取料机无人值守系统的PLC控制指令承担着自动化堆料和取料作业的执行任务。系统利用激光扫描技术,对料堆进行动态捕捉,形成三维图像及料堆信息数据库。基于这些数据,堆料和取料计划被转换为具体的PLC指令,指导设备按照预设的堆形、堆宽和堆高参数完成作业。PLC控制单元设于输煤程控室,负责解析作业任务,将操作台及过程控制系统的指令传输至机载PLC,同时实时反馈设备状态。该控制系统包含多种操作模式,如就地操作、远程手动、远程半自动和远程全自动,适应不同作业环境的需求。PLC指令不*调控堆取料机的悬臂俯仰、回转和行走动作,还结合编码器及格雷母线定位信息,保障设备定位的精确和动作的协调。在自动堆料过程中,PLC依据激光扫描结果动态调整堆料位置与高度,避免物料堆积过高或不足,提升作业效率。取料阶段,PLC控制刮板的运行速度和俯仰角度,维持取料流量的稳定,确保物料输送连续。上海诺尚信息技术有限公司结合激光扫描、视频监控、无线通信及安全防护技术,开发了稳定高效的堆取料机无人值守系统PLC控制方案,支持客户实现智能化堆场管理,提升生产效率并降低运营成本。河南堆取料机无人值守系统自动取料哪家好堆取料机无人值守系统结合PLC控制指令实现设备智能联动,确保自动化作业流程高效顺畅。
料位检测堆取料机无人值守系统在煤矿、石化及电力行业的应用逐渐普及,成为自动化管理的重要工具。系统采用雷达料位检测技术,能够持续监控料堆高度及设备负载,减少了人工估测的误差和潜在安全风险。无人值守功能使得堆料和取料作业能够自动执行,降低了对人工操作的依赖,从而减轻了劳动强度并提升了作业的持续性。该系统融合激光扫描、视频监控、无线通信和PLC控制技术,完成料堆的三维动态建模和精确控制,智能识别料堆形态的变化并调整作业策略,有效提高了物料空间利用率。安全模块配备有急停按钮及毫米波雷达防撞功能,保障设备及人员的安全。管理人员通过远程操作台实现对整个流程的监控和控制,增强了管理的便捷性和准确性。上海诺尚信息技术有限公司专注于工业物联网的智能信息技术集成,依托丰富的研发经验,打造了数字化料场无人值守系统,服务于华电集团、国家能源等大型企业,助力客户提升生产管理水平并优化运营成本,获得了认可。
悬臂防撞堆取料机无人值守系统的操作依赖于PLC控制指令的准确传递和执行。PLC系统接收中控平台制定的堆取料作业计划,将其转化为具体的指令,控制堆取料机的各个机械部件。系统首先利用激光扫描仪对料堆进行实时的三维扫描,采集详细的几何信息,随后中控系统对这些数据进行分析,确定料堆特征及作业路径。PLC根据处理结果,计算出悬臂的俯仰角度、回转角度以及大车的起始位置。通过与绝对值编码器或格雷母线定位系统反馈的位置数据进行比对,PLC发出电机旋转方向和速度的指令,实现精确的定位和动作控制。此流程使堆料机能够自动完成悬臂的仰回转动作,取料机则能准确移动至指定取料点并调整刮板角度,完成自动取料。系统中还集成了超声波雷达和毫米波雷达的信号处理逻辑,针对防撞需求,PLC能够根据检测到的障碍物信号及时发出停止或调整动作的指令,减少设备碰撞风险。上海诺尚信息技术有限公司自2005年成立,专注于智能信息技术集成,面向煤矿和火电行业提供无人值守解决方案。公司开发的PLC控制系统结合激光扫描、定位识别及安全防护技术,支持堆取料机自动化作业的精确控制与安全管理,助力企业提升生产效率并降低运营风险。通过三维可视化,堆取料机无人值守系统提供直观煤场视图,辅助决策并预防潜在风险。
工矿企业在堆取料作业中,自动化系统集成了激光扫描、料位检测、定位识别、安全防护、无线通信、视频监控、软件架构及PLC控制等多个关键模块。激光扫描技术对料堆进行持续动态监测,生成三维图像及数据库信息,从而支持路径和参数的精确计算。料位检测模块则负责监控料堆高度和设备负荷,辅助调整设备状态以维持作业稳定。定位识别系统采用格雷母线定位方案,结合电子编码器和电磁发射器,实现对斗轮机位置的准确识别和控制。安全防护体系涵盖急停按钮、毫米波雷达及超声波雷达等多重措施,保障设备及人员的安全。无线通信网络搭建稳定的数据传输环境,支持远程视频监控,提升操作灵活性。视频监控系统覆盖关键部位,实现全过程监控。软件架构基于面向对象设计,采用C/S架构,配合三维图形绘制及数据处理能力,实现设备精确控制和三维仿真。PLC控制系统解析作业指令,生成控制命令并反馈设备状态,使堆取料机按照计划高效运转。上海诺尚信息技术有限公司凭借丰富的研发实力,打造了成熟的数字化料场无人值守系统,致力于为工矿企业提供智能堆取料解决方案,助力提升生产效率和安全水平,降低运营成本,赢得了众多大型企业的认可。工业应用中,堆取料机无人值守系统通过实时扫描技术,捕捉煤堆形态和温度变化,强化安全监测。陕西堆取料机无人值守系统集成平台的优点
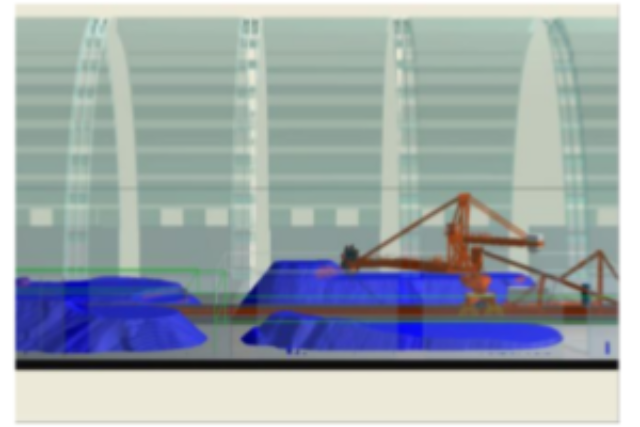
软件架构采用分布式控制策略,实现斗轮机定位识址堆取料机无人值守系统设备协同与数据共享。河南堆取料机无人值守系统3D建模图像
操作大型料场堆取料机无人值守系统时,远程监控与自动化控制的协调至关重要。操作台设于输料综合楼,配备操纵杆、按钮及选择开关,操作人员借此实现对堆取料机的实时指令下达。作业流程从确认计划开始,系统接收任务信息,包括货种及预定作业量,自动查询基础数据库中的堆比重与堆积角度,确定堆积方式和相关参数。接着,系统分析料场当前状态,指定机械设备、堆积位置及料堆高度,生成控制指令并传输至机载PLC。操作人员可根据现场需求,在远程手动、半自动及全自动三种模式间切换。全自动模式依托激光扫描数据,自动计算堆取点并执行作业,堆料机根据传感器数据调整悬臂俯仰及回转角度,取料机则调整刮板速度及行走范围,保持取料流量稳定。系统实时监控作业进度及剩余堆积容量,操作人员可据此调整计划或启用备用堆场。安全防护系统持续监测设备周边环境,异常情况时自动触发急停或减速,保障人员安全。数据采集和设备控制通过工业以太网和现场总线实现高效协同,视频监控与控制系统分开组网,防止信号干扰。上海诺尚信息技术有限公司凭借丰富行业经验,开发出操作简便且稳定的无人值守系统,支持客户实现远程集中管理,降低人工强度,提升管理效率。河南堆取料机无人值守系统3D建模图像
上海诺尚信息技术有限公司是一家有着先进的发展理念,先进的管理经验,在发展过程中不断完善自己,要求自己,不断创新,时刻准备着迎接更多挑战的活力公司,在上海市等地区的安全、防护中汇聚了大量的人脉以及**,在业界也收获了很多良好的评价,这些都源自于自身的努力和大家共同进步的结果,这些评价对我们而言是比较好的前进动力,也促使我们在以后的道路上保持奋发图强、一往无前的进取创新精神,努力把公司发展战略推向一个新高度,在全体员工共同努力之下,全力拼搏将共同上海诺尚信息供应和您一起携手走向更好的未来,创造更有价值的产品,我们将以更好的状态,更认真的态度,更饱满的精力去创造,去拼搏,去努力,让我们一起更好更快的成长!