商机详情 -
武汉电子装配流水线厂家
视觉检测系统的图像处理算法采用深度学习技术,不断提升对装配缺陷的识别能力。传统的基于规则的图像处理算法对复杂缺陷的识别能力有限,容易受光照变化、背景干扰等因素影响。采用深度学习技术后,系统通过大量标注的缺陷图像数据对神经网络进行训练,使算法能够自主学习不同类型缺陷的特征,如管路接口的微小裂缝、密封胶的气泡、零件表面的划痕等。在实际检测过程中,深度学习算法能够在复杂的背景中准确识别出各种缺陷,即使是细微的、以前未见过的缺陷类型,也能通过其泛化能力进行判断。同时,系统还具备在线学习功能,操作人员可以对误判的缺陷图像进行标注和修正,算法会根据新的标注数据进行自我优化,不断提高识别精度。这种基于深度学习的视觉检测技术,使缺陷识别率提升至 99.9% 以上,大幅降低了漏检率和误检率。视觉检测缺陷自动标记,指导后续返修。武汉电子装配流水线厂家
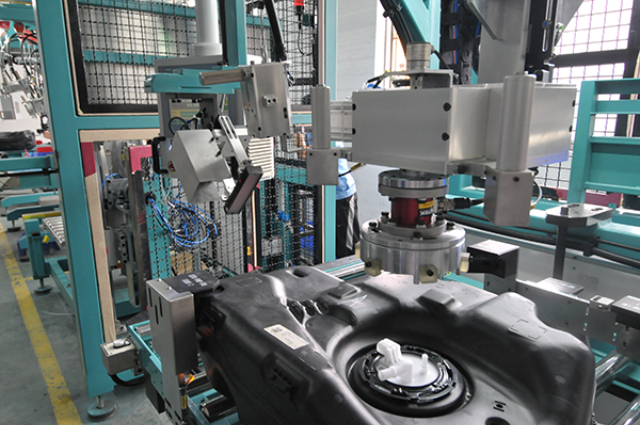
在汽车油箱装配流水线中,自动翻转定位功能与视觉检测功能的协同工作,实现了装配过程的准确定位与质量监控。当油箱壳体被输送至某一装配工位需要调整姿态时,自动翻转定位装置会根据预设程序将油箱翻转至指定角度,此时视觉检测系统会立即对翻转后的油箱位置进行确认。视觉相机拍摄油箱上的定位标记,通过图像处理算法计算出实际位置与理论位置的偏差,并将偏差数据反馈给翻转定位控制系统。控制系统根据反馈数据驱动翻转机构进行微调,直至油箱位置偏差在允许范围内(通常不超过 ±0.1mm)。在后续的装配过程中,视觉系统会持续监测油箱的位置变化,若因外部因素导致油箱发生微小位移,会及时通知翻转定位装置进行补正。这种实时的定位反馈与调整机制,确保了整个装配过程中油箱始终处于准确的装配位置,为各部件的高质量装配提供了可靠保障。佛山电机装配流水线哪家强泵阀装配扭矩监控,确保连接强度达标。

电性能测试系统具备完善的自我校准功能,能够定期对测试设备的精度进行校验,保证测试数据的准确性。测试系统会按照预设的周期(如每天开工前等)自动启动校准程序,通过连接标准校准件(如标准电阻、标准电压源等)对测试设备的各项参数进行校准。校准过程中,系统会将测试设备测量的标准件数据与标准值进行比对,计算误差值。若误差在允许范围内,则校准通过;若误差超出允许范围,系统会自动调整测试设备的内部参数进行补偿,若补偿后仍无法达到精度要求,则会发出报警信号,提示操作人员对设备进行检修或更换部件。校准数据会被自动记录并存储,形成完整的校准档案,便于质量追溯和设备管理。这种定期自我校准功能,确保了电性能测试设备长期保持较高的测量精度,为产品质量判断提供了可靠的数据基础。
气密性测试工位的充气系统采用精密流量控制技术,确保测试压力的稳定和准确调节。充气系统由空气压缩机、干燥过滤器、精密减压阀、流量控制器等组成。空气压缩机提供的压缩空气首先经过干燥过滤器去除水分和杂质,保证测试介质的洁净度。精密减压阀将压缩空气压力调节至略高于测试所需的压力值,为后续的精确控制提供基础。流量控制器采用电子式质量流量控制器,能够精确控制充气过程中的气体流量,使油箱内的压力按照预设的曲线缓慢上升至测试压力值,避免因压力上升过快导致油箱壳体变形或接口密封面受损。当油箱内压力达到预设值后,流量控制器会自动关闭,进入保压阶段。在整个充气和保压过程中,压力传感器会实时监测压力变化,确保压力控制精度在 ±0.5kPa 以内。这种精密的流量和压力控制技术,保证了气密性测试结果的准确性和可靠性。嵌环锁紧完成自动检测,确认安装到位。

自动翻转定位功能的伺服驱动系统具备高精度的位置控制能力,为油箱装配过程中的复杂动作提供了稳定可靠的动力支持。该系统采用进口高精度伺服电机和行星齿轮减速器,通过脉冲控制方式实现对翻转角度的精确控制,控制分辨率可达 0.001 度。伺服驱动系统配备有完善的闭环反馈机制,通过XXXXXXXXXXXXXXXXXXXXXXXXX值编码器实时采集翻转机构的实际位置,并将其与指令位置进行比较,形成位置闭环控制。当翻转机构受到外部负载扰动导致位置偏差时,伺服系统会迅速调整输出扭矩,纠正位置偏差,确保翻转角度的准确性。同时,伺服系统还具备过载保护、过温保护等功能,当翻转过程中出现负载过大或电机温度过高时,会自动停止运行并发出报警信号,防止设备损坏。这种高精度、高可靠性的伺服驱动系统,是自动翻转定位功能实现准确操作的关键保障。自动翻转定位速度可调,适配不同装配节奏。佛山绿色环保装配流水线订做价格
气密性测试不合格品自动分拣,防止流入下道。武汉电子装配流水线厂家
泵阀装配工位的机械臂采用冗余自由度设计,具备高度的运动灵活性,能够适应复杂的装配动作需求。泵阀的装配过程往往需要机械臂在有限的空间内完成抓取、移动、对位、安装等一系列复杂动作,传统的六自由度机械臂可能会因运动空间限制而无法完成某些动作。冗余自由度机械臂(如七自由度机械臂)通过增加一个额外的自由度,使其运动空间更加灵活,能够以更多种姿态到达目标位置,有效避免了运动干涉问题。在泵阀装配过程中,机械臂可以通过调整冗余自由度的关节角度,找到合适的装配路径,使泵阀能够在复杂的油箱结构中顺利完成对位和安装。同时,冗余自由度设计还提高了机械臂的容错能力,当某一关节出现轻微故障时,系统可以通过调整其他关节的角度来补偿,确保装配任务的继续进行。这种高灵活性的机械臂,为泵阀装配的自动化和准确化提供了有力支持。武汉电子装配流水线厂家