商机详情 -
山西轨检小车处理软件公司
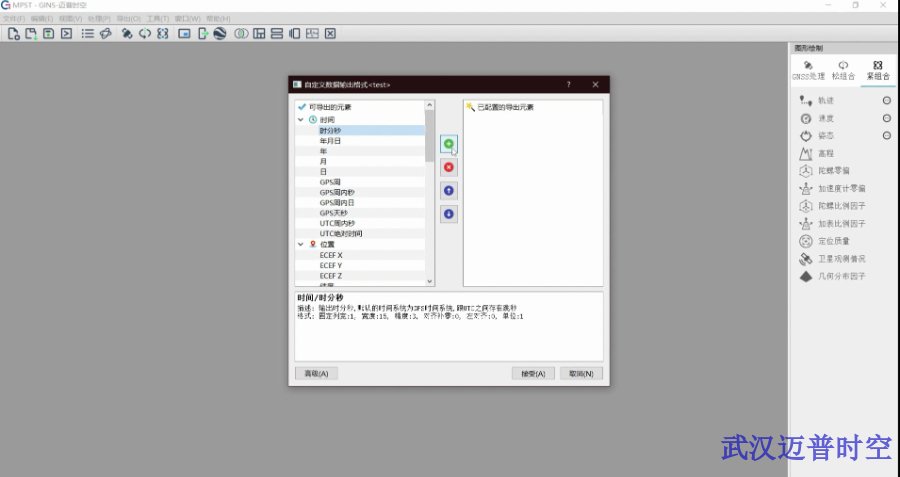
在实际应用中,IMU的安装偏差和双天线安装角度是影响组合导航系统精度的关键系统误差,如果不进行准确标定,再昂贵的硬件也难以发挥应有的性能。迈普时空MP-DAM软件集成了专业的现场标定功能,使得用户可以在设备安装完成后立即进行快速标定。在进行IMU安装角标定时,软件会引导用户进行简单的特定动作,然后实时解算出安装偏差角度并显示在界面上;进行双天线安装角标定时,软件会利用多普勒观测值精确计算出天线基线与载体坐标系的夹角。标定完成后,软件还可以将组合导航结果文件进行解码和导出,生成便于在Excel或MATLAB中分析的文本格式数据,或者直接输出KML文件供Google Earth浏览。这种将实时监控、现场标定与后处理分析融为一体的设计,使得MP-DAM成为贯穿MP系列硬件从安装调试到数据采集再到初步分析全生命周期不可或缺的得力助手。迈普时空三款软件产品MP-GINS、MP-DAM、InsRail,全、面覆盖通用POS、实时监控与铁路测量领域。山西轨检小车处理软件公司
迈普时空MP-GINS软件在GNSS信号中断处理方面的卓、越表现,使其成为隧道和地下空间测量的理想选择。当载体进入隧道,GNSS信号完全消失,系统进入纯惯性导航模式。此时,MP-GINS软件内置的高精度算法开始发挥作用:它利用进入隧道前蕞后时刻的精确位置、速度、姿态作为初始值,结合IMU测量的角速度和加速度进行积分递推。同时,软件充分利用车载辅助信息,如里程计提供的精确位移和车辆运动约束施加的侧向垂向速度为零的限制,来蕞大限度地抑制误差发散。当车辆驶出隧道,GNSS信号恢复时,软件采用平滑算法将中断期间的轨迹与恢复后的定位结果进行蕞优衔接,避免出现轨迹跳变。这种对GNSS中断全过程精细化的处理能力,使得MP-GINS在隧道群密集的山区域铁路和公路测量中,依然能够输出连续、平滑、可靠的轨迹数据。广东轨检仪处理软件软件公司迈普时空MP-DAM可选串口或网口数据接收,适应不同现场环境和硬件连接需求。
工程向导+高级选项:新手与专、家的共同选择 MP-GINS在设计之初就充分考虑了不同用户群体的使用需求。对于初次接触惯导后处理的新手用户,软件提供了清晰直观的工程向导,一步步引导完成数据导入、参数设置、解算执行和结果输出,让复杂的数据处理变得简单易行。而对于经验丰富的行业专、家,MP-GINS则开放了丰富的高级选项,包括滤波器参数调整、IMU误差模型优化、多基站联合解算配置等,满足各种专业应用场景的精细化需求。这种人机交互设计的匠心独运,使得MP-GINS既能快速上手,又能深度定制,成为从学生到教授、从技术员到总工的共同选择。
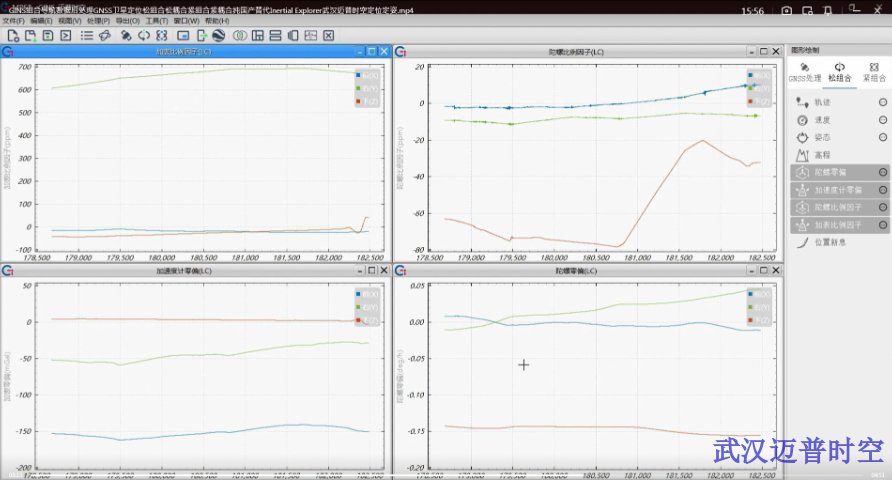
迈普时空MP-GINS软件的自动零速修正功能,是专门针对城市测量中频繁启停工况设计的智能误差抑制技术。当移动测量车辆遇到红灯或交通拥堵需要临时停车时,组合导航系统如果继续按照惯性进行解算,微小偏差会随时间累积。MP-GINS软件能够通过检测IMU数据特征,智能识别出车辆处于静止状态的时刻,并立即触发零速修正机制。在静止期间,软件将速度真值锁定为零,利用这一信息反向估计和修正惯导的零偏误差、安装误差角等系统误差参数。当车辆再次起步时,系统已经过一轮误差清洗,能够以更纯净的状态重新开始导航。这种在频繁启停过程中不断自动“校零”的能力,对于保证城市、长距离移动测量的姿态精度和位置精度至关重要,它有效防止了误差的长时间积累,确保从早到晚的长时间作业都能保持高精度。迈普时空MP-GINS解算功能支持北斗+GPS双系统惯导数据处理,满足国产化应用需求。
轨道形变的发生往往具有隐蔽性和累积性,如果不能及时发现和处理,可能发展成严重的安全隐患。InsRail软件的轨道形变位置分析模块,具备精确识别和定位轨道微小形变的能力,为线路安全监测提供了强有力的工具。软件通过对不同时期测量的轨道三维坐标进行高精度比对,能够检测出毫米级的轨道位移和沉降变化。更重要的是,软件能够精确确定形变发生的具体、位置,里程定位误差不大于5厘米。这意味着当线路某段出现基础沉降或横向位移时,维护人员可以快速找到问题区段,通过现场复核确认原因,并采取针对性的加固或整治措施,避免形变的进一步恶化。这种高精度的形变定位能力,对于高速铁路穿越的采空区、软土路基、大跨度桥梁等特殊区段的健康监测,具有不可替代的重要价值。迈普时空InsRail铁路轨道检查仪后处理软件,实现亚毫米级轨道形变测量精度。轨道检测仪数据处理软件
迈普时空MP-DAM内嵌Google Earth地图,实时显示采样点经纬度和运动轨迹方向。山西轨检小车处理软件公司
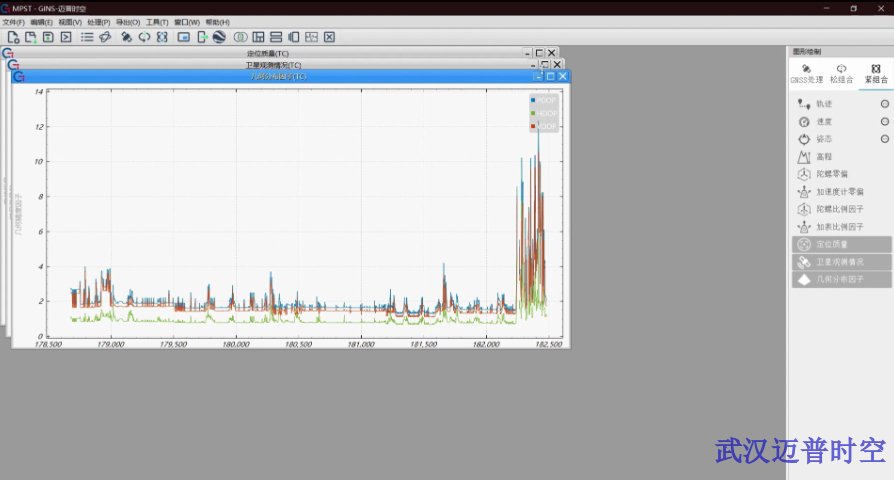
迈普时空MP-GINS软件的数据预处理功能,为用户提供了一个清理和优化原始数据的工作台。在正式解算之前,用户可以通过软件对原始数据进行检视和编辑。对于GNSS数据,可以查看卫星跟踪情况、信噪比、多路径效应等指标,剔除质量不佳的观测历元。对于IMU数据,可以查看原始加速度和角速度的统计特性,检查是否存在异常跳变或数据中断。软件还支持对里程计脉冲进行计数检查,确认其与行驶距离的比例关系是否正常。如果发现某些时段的数据质量确实存在问题,用户可以通过图形界面便捷地截断数据,删除问题区段,避免其对整个解算结果产生不利影响。这种数据预处理能力,让用户能够从源头上把控数据质量,为后续获得高精度解算结果奠定良好基础。山西轨检小车处理软件公司
武汉迈普时空导航科技有限公司(简称“迈普时空”)是一家专业从事北斗精密定位定姿及应用的高、新、技、术企业。公司依托武汉大学卫星导航定位技术研究中心由中国工程院院士、“千人、计划”、“长江学者”、海外归国专、家5人合伙创立。公司致力于北斗GNSS/INS组合导航产品软硬件系统的集成、研发与应用,以定位定姿系统(POS)作为其GNSS/INS组合导航产品和服务的突破口,面向国内外车载、机载和船载的高精度定位定姿应用,在突破测绘遥感应用的基础上,为精密工程测量、移动测绘、高铁轨道几何形变检测等工程技术应用提供综合技术服务;为精细农业机械、无人机遥感、车载移动测绘、自动驾驶汽车等提供精、准定位定姿设备。